


Buenas, estoy diseñando un circuito para hacer los movimientos tilt/pan sobre una camara de video mediante dos motores paso a paso.
Estoy simulando en proteus el PIC16F877A y las 4 bobinas del motor. He puesto un transistor de potencia TIP122 NPN. Este es el circuito:
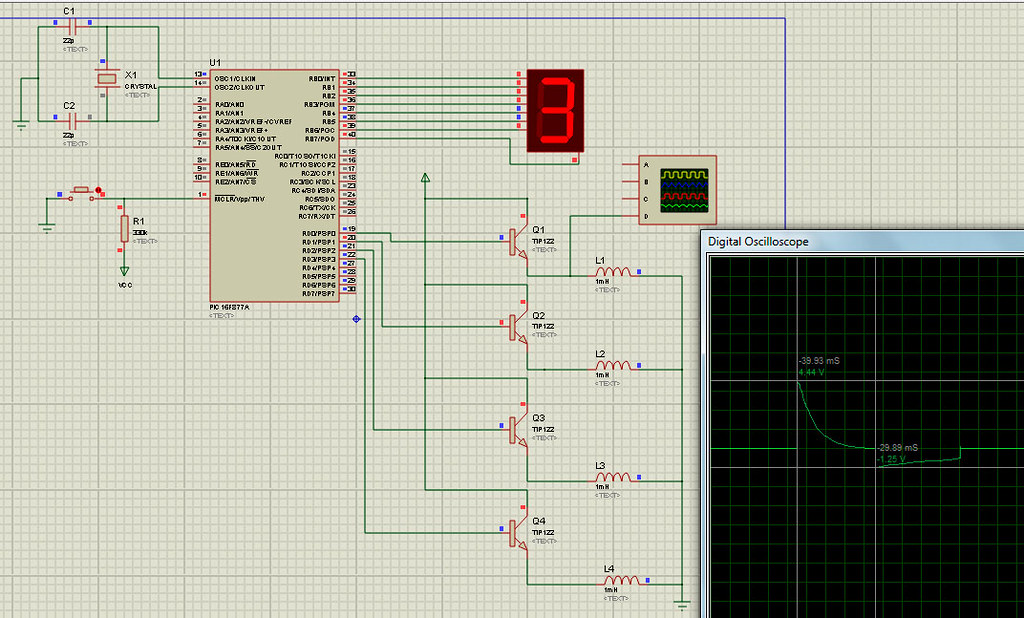
Problema _ tensión negativa por Iñaki Gomez Miravalles, en Flickr
Obtengo un pulso positivo de 4,5V, pero el problema como veis es que antes de llegar el próximo pulso se genera una tensión negativa de -1.25V en el bobinado y considero que no es recomendable.
En un circuito similar, he visto que ponene un diodo 1N4001 y segun dicen es para evitar tensiones negativas:

El problema es que no sé como conectar ese diodo en mi esquema, porque mi transistor es NPN y el de la imagen es PNP o no se porque, al colocarlo como en este circuito de muestra no hace lo que quiero que haga.
¿Alguién sabría decirme como conectar el diodo para evitar esas tensiones negativas?
¿Es preferible usar en este caso un transistor NPN? ¿No importa? ¿Porque?
Estoy abierto a otras sugerencias claro.
Os dejo el programa en C y los archivos proteus por si los necesitais:
No hagais caso al nombre, es un ejemplo sacado de este mismo foro para practicar. Lo importante es el comportamiento del motor.
Muchas gracias por vuestra ayuda chicos")
Estoy simulando en proteus el PIC16F877A y las 4 bobinas del motor. He puesto un transistor de potencia TIP122 NPN. Este es el circuito:
Problema _ tensión negativa por Iñaki Gomez Miravalles, en Flickr
Obtengo un pulso positivo de 4,5V, pero el problema como veis es que antes de llegar el próximo pulso se genera una tensión negativa de -1.25V en el bobinado y considero que no es recomendable.
En un circuito similar, he visto que ponene un diodo 1N4001 y segun dicen es para evitar tensiones negativas:
El problema es que no sé como conectar ese diodo en mi esquema, porque mi transistor es NPN y el de la imagen es PNP o no se porque, al colocarlo como en este circuito de muestra no hace lo que quiero que haga.
¿Alguién sabría decirme como conectar el diodo para evitar esas tensiones negativas?
¿Es preferible usar en este caso un transistor NPN? ¿No importa? ¿Porque?
Estoy abierto a otras sugerencias claro.
Os dejo el programa en C y los archivos proteus por si los necesitais:
No hagais caso al nombre, es un ejemplo sacado de este mismo foro para practicar. Lo importante es el comportamiento del motor.
Muchas gracias por vuestra ayuda chicos
Última edición: