Muy buenas,
Recurro a vosotros como unica alternativa ya que nadie me echa una mano
Tengo 2 dudas diferentes:
1ª Duda:
La cosa resulta que estoy haciendo mi proyecto fin de carrera con unos PIC Servo SC. Bien, estos PIC son tremendamente sensibles al ruido en las patillas de VCC y MCLR.
Estuve mas de dos meses para descubrir que debia filtrar ambas patillas con unos condensadores cerámicos pegados a ambas patilla del chip, claro, yo en mi ignorancia y falta de práctica no habia trabajado casi nada con PIC's y estuve mirando mil y una posibilidades de porque eso no funcionaba y no fué por casualidad que caí en eso un dia despues de 2 meses...
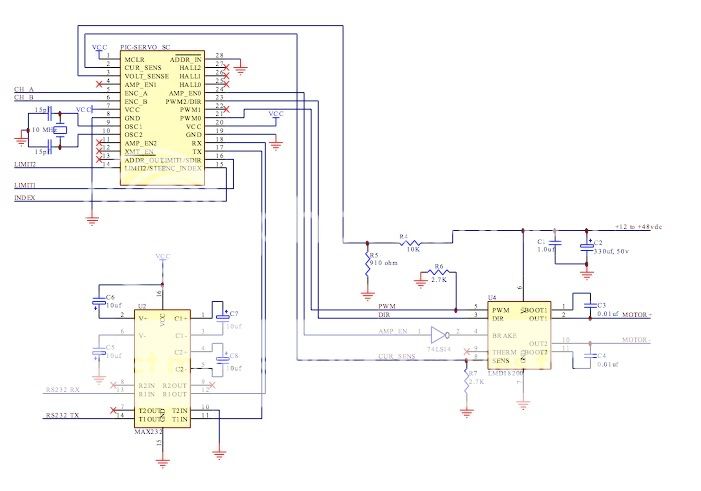
Bien, mi problema ahora es que el chip funciona, pero este chip se usa para mover motores paso a paso, trifasicos o de continua. Normalmente se usan para motores de continua con encoders diferenciales, pero vamos que eso no es lo importante, lo importante es que ahora debido a que es tan sensible al ruido, el chip cuando enciendo el motor se resetea.
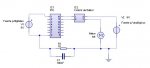
He puesto el osciloscopio con un trigger a 4.6 v (si baja de 4.5 la tensión el chip se resetea), y vi que cuando enviaba movimiento al motor (el chip se apagaba) y que en el osciloscopio salia una señal senoidal parecida a esta (solo parecida en la forma en el sentido de que da un pico y se va atenuando en el tiempo, el intervalo de atenuación es de nanosegundos):

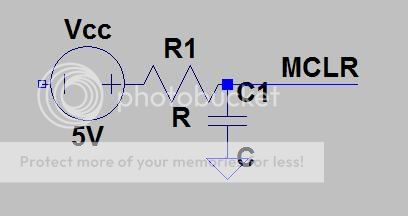
Entonces ahi surgieron mis problemas actuales, no era capaz de filtrar las entradas de VCC y MCLR lo suficiente como para que dicho pulso no les afectara. Daba igual que pusiera una resistencia adecuada al condensador para hacer un Filtro RC, el ruido seguia siendo el misma.
La resistencia es de 100 Ω, y el condensador de 1µF. He probado con varias resistencias y condensadores diferentes (antes de que se me ocurriera esto ultimo de filtar las propias patillas del LMD que van al motor como ya dije), incluso con uno electrolicito y otro cerámico (para ruidos rapidos y lentos) y el resultado fue el mismo.
Este era el filtro mas o menos "definitivo" que diseñé y que debería funcionar pero no lo hacia:
Entonces se me ocurrió filtrar lo que estaba metiendo el ruido a la "red" de mi circuito por asi decirlo, esto es, las dos patas del LMD18200 que enviaban la tension al motor de continua (+12 -12), con otros dos condensadores cerámicos a tierra.
Miré la pata de MCLR que tenia ese filtro y esta NO recibia pico al dar orden al motor de moverse! bien!.
Pero claro, seguian recibiendo pico el resto de patas de alimentación del PIC. Por lo que las filtré todas con el mismo filtro.
El problema es que ahora el chip no "enciende" a pesar de leer con el tester y haber 5V en todas sus patillas de alimentacion incluida MCLR.. y bueno, ya veré porque mañana lo estudiaré (dado que esto ultimo que he descubierto fue ayer mismo) pero mi problema básicamente es que no se si lo he hecho bien, si he diseñado bien el filtro o si esta bien puesto como lo he hecho ni nada...
2ª Duda:
Bien, en su momento me impartieron una clase de diseño electronico asistido por ordenador que debía de tener una duración de 3 meses, pero que por falta del profesor, solo tuvimos 15 dias de clase y ale palante.. lo que me produjo una grave falta de conocimientos en un área para mí ahora mismo importante. El diseño de placas PCB con orcad (en este caso).
Bien, he bajado un par de tutoriales de la universidad de Maryland y entre eso y un poco que sabia de usar el Workbench, pspice y demas, me he "defendido".
Pero claro mis problemas surgen cuando quiero poner alguna cosa que no es un estandar como una resistencia y demas. Porque para pasarlo al Layout plus necesitas ponerle un footprint y yo no tengo ni idea de que footprint ponerle a algo que no se ni como llamarlo.
Es mas en el Capture CIS (que es donde he diseñado las placas para luego pasarlas al layout), no sabia bien como se llamaba lo que estoy buscando...
Y esa es mi duda!, os enseño unas imagenes y me decis como podria llamarse esto en el Capture o su footprint:

Esto es una especie de conector paralelo para ponerle un cable IDE e interconectar varias placas.
Yo en el capture le puse como "conector" y le puse un footprint de un conector tambien que vi.. pero no creo que esté bien, no se, si eso saco fotos tambien a ambos para que los veais.
y luego las otras dos fotos son de la misma cosa:

Se lo que es, lo he visto millones de veces, pero no se como se llama ni se que debería poner en el Capture CIS, es decir, su nombre Técnico de libreria de orcad. Lo quiero usar para alimentar al circuito y ponerle la tierra por ahi... pero no se como ponerlo en el capture.
En fin, estas son mis dos dudas actualmente y se que quizás no me he expresado todo lo bien que pudiera pero lo cierto es que una cosa si me pasa y es que llevo meses totalmente estresado con problemas tontos que me vuelven loco, estoy mareado de tando mirar tutoriales, hojas de datos y demas rollos y que nadie me eche una manita... asi que si podeis ayudarme un poquito en eso os lo agradeceria muchisimo.
Sea como sea y aunque no podais, muchisimas gracias por vuestra atención y que paseis un feliz verano.
Recurro a vosotros como unica alternativa ya que nadie me echa una mano
Tengo 2 dudas diferentes:
1ª Duda:
La cosa resulta que estoy haciendo mi proyecto fin de carrera con unos PIC Servo SC. Bien, estos PIC son tremendamente sensibles al ruido en las patillas de VCC y MCLR.
Estuve mas de dos meses para descubrir que debia filtrar ambas patillas con unos condensadores cerámicos pegados a ambas patilla del chip, claro, yo en mi ignorancia y falta de práctica no habia trabajado casi nada con PIC's y estuve mirando mil y una posibilidades de porque eso no funcionaba y no fué por casualidad que caí en eso un dia despues de 2 meses...
Bien, mi problema ahora es que el chip funciona, pero este chip se usa para mover motores paso a paso, trifasicos o de continua. Normalmente se usan para motores de continua con encoders diferenciales, pero vamos que eso no es lo importante, lo importante es que ahora debido a que es tan sensible al ruido, el chip cuando enciendo el motor se resetea.
He puesto el osciloscopio con un trigger a 4.6 v (si baja de 4.5 la tensión el chip se resetea), y vi que cuando enviaba movimiento al motor (el chip se apagaba) y que en el osciloscopio salia una señal senoidal parecida a esta (solo parecida en la forma en el sentido de que da un pico y se va atenuando en el tiempo, el intervalo de atenuación es de nanosegundos):
Entonces ahi surgieron mis problemas actuales, no era capaz de filtrar las entradas de VCC y MCLR lo suficiente como para que dicho pulso no les afectara. Daba igual que pusiera una resistencia adecuada al condensador para hacer un Filtro RC, el ruido seguia siendo el misma.
La resistencia es de 100 Ω, y el condensador de 1µF. He probado con varias resistencias y condensadores diferentes (antes de que se me ocurriera esto ultimo de filtar las propias patillas del LMD que van al motor como ya dije), incluso con uno electrolicito y otro cerámico (para ruidos rapidos y lentos) y el resultado fue el mismo.
Este era el filtro mas o menos "definitivo" que diseñé y que debería funcionar pero no lo hacia:
Entonces se me ocurrió filtrar lo que estaba metiendo el ruido a la "red" de mi circuito por asi decirlo, esto es, las dos patas del LMD18200 que enviaban la tension al motor de continua (+12 -12), con otros dos condensadores cerámicos a tierra.
Miré la pata de MCLR que tenia ese filtro y esta NO recibia pico al dar orden al motor de moverse! bien!.
Pero claro, seguian recibiendo pico el resto de patas de alimentación del PIC. Por lo que las filtré todas con el mismo filtro.
El problema es que ahora el chip no "enciende" a pesar de leer con el tester y haber 5V en todas sus patillas de alimentacion incluida MCLR.. y bueno, ya veré porque mañana lo estudiaré (dado que esto ultimo que he descubierto fue ayer mismo) pero mi problema básicamente es que no se si lo he hecho bien, si he diseñado bien el filtro o si esta bien puesto como lo he hecho ni nada...
2ª Duda:
Bien, en su momento me impartieron una clase de diseño electronico asistido por ordenador que debía de tener una duración de 3 meses, pero que por falta del profesor, solo tuvimos 15 dias de clase y ale palante.. lo que me produjo una grave falta de conocimientos en un área para mí ahora mismo importante. El diseño de placas PCB con orcad (en este caso).
Bien, he bajado un par de tutoriales de la universidad de Maryland y entre eso y un poco que sabia de usar el Workbench, pspice y demas, me he "defendido".
Pero claro mis problemas surgen cuando quiero poner alguna cosa que no es un estandar como una resistencia y demas. Porque para pasarlo al Layout plus necesitas ponerle un footprint y yo no tengo ni idea de que footprint ponerle a algo que no se ni como llamarlo.
Es mas en el Capture CIS (que es donde he diseñado las placas para luego pasarlas al layout), no sabia bien como se llamaba lo que estoy buscando...
Y esa es mi duda!, os enseño unas imagenes y me decis como podria llamarse esto en el Capture o su footprint:
Esto es una especie de conector paralelo para ponerle un cable IDE e interconectar varias placas.
Yo en el capture le puse como "conector" y le puse un footprint de un conector tambien que vi.. pero no creo que esté bien, no se, si eso saco fotos tambien a ambos para que los veais.
y luego las otras dos fotos son de la misma cosa:
Se lo que es, lo he visto millones de veces, pero no se como se llama ni se que debería poner en el Capture CIS, es decir, su nombre Técnico de libreria de orcad. Lo quiero usar para alimentar al circuito y ponerle la tierra por ahi... pero no se como ponerlo en el capture.
En fin, estas son mis dos dudas actualmente y se que quizás no me he expresado todo lo bien que pudiera pero lo cierto es que una cosa si me pasa y es que llevo meses totalmente estresado con problemas tontos que me vuelven loco, estoy mareado de tando mirar tutoriales, hojas de datos y demas rollos y que nadie me eche una manita... asi que si podeis ayudarme un poquito en eso os lo agradeceria muchisimo.
Sea como sea y aunque no podais, muchisimas gracias por vuestra atención y que paseis un feliz verano.