Buenas les presento mi proyecto seguidor de lineas, aunque es muy teorico por si podriais encontrar fallas en mi diseño.
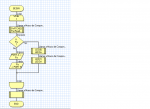
El programa esta echo en Flowcode ya que al no saber nada de programacion fue la via mas grafica que encontre para realizarlo
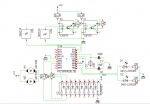
el S3 esta leyendo el estado esperando hasta que le llegue un 1 para activar los 2 motores
el S2 esta cuando le llegue un 1 activara un motor siempre que el S3 no este activo
el S1 esta cuando le llegue un 1 activara un motor siempre que el S3 no este activo
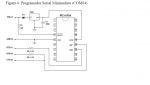
Como Programador de PICs como estoi iniciandome en este campo encontre un esquema bastante sencillo el COM84 el cual me decian que usara el prog84 para grabar el pic pero e tenido problemas por que me dice que esta obsoleto el que me descargue sabeis de alguno que pudiera funcionar? con este esquema? algun consejo?
Ante todo gracias por cualquier aporte
El programa esta echo en Flowcode ya que al no saber nada de programacion fue la via mas grafica que encontre para realizarlo
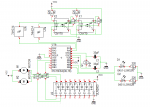
el S3 esta leyendo el estado esperando hasta que le llegue un 1 para activar los 2 motores
el S2 esta cuando le llegue un 1 activara un motor siempre que el S3 no este activo
el S1 esta cuando le llegue un 1 activara un motor siempre que el S3 no este activo
Como Programador de PICs como estoi iniciandome en este campo encontre un esquema bastante sencillo el COM84 el cual me decian que usara el prog84 para grabar el pic pero e tenido problemas por que me dice que esta obsoleto el que me descargue sabeis de alguno que pudiera funcionar? con este esquema? algun consejo?
Ante todo gracias por cualquier aporte
")