No es totalmente correcto lo que se ha respondido! Vayamos por partes:
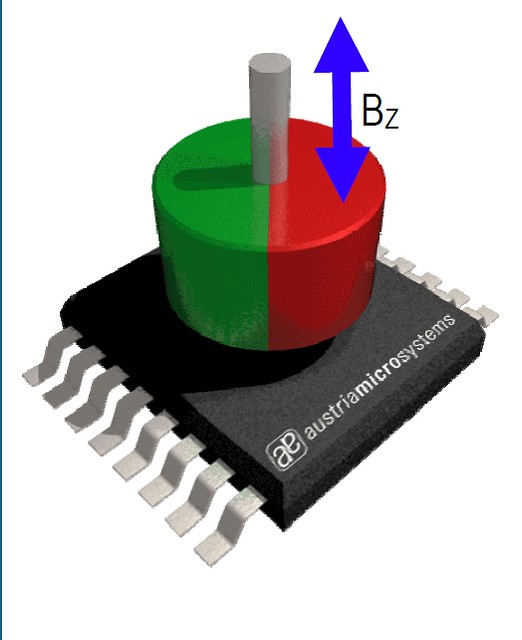
Yo uso un encode angular magnético de la empresa
"ams":
El codificador AS5047B nos da 11 bit como condificacion de cuadratura. Son hasta 2024 posiciones por giro completo. Eso es lo que se denomina "incremental encoding" a diferencia del absolut encoding donde esta parte tiene una resolución de 14 bits o 4096 posiciones por giro de 360°!
Para mis experimental me compré el kit de evaluación:
En
este enlace encuentras todos los detalles!
Los codificadores son baratos, de la misma empresa se pueden conseguir los magnetos requeridos!
Yo lo que hago es poner el magneto con materiales no magneticos en el eje de rotación y la plaquita con el sensor en el empaque. en mi caso por ejemplo lo uso para monitoriar la posición angular de la vela del modelo de un velero que construyo. El eje vertical de rotación del palo de la vela mayor lo prolongué al punto que el magneto montado en la punta del eje derotación casi que toca la cubierta del velero. La cubierta del velero allí tiene un hueco circular y viene cubierto de un folio de plástico. Así el agua no toca el sensor y al magneto no le molesta la humedad!
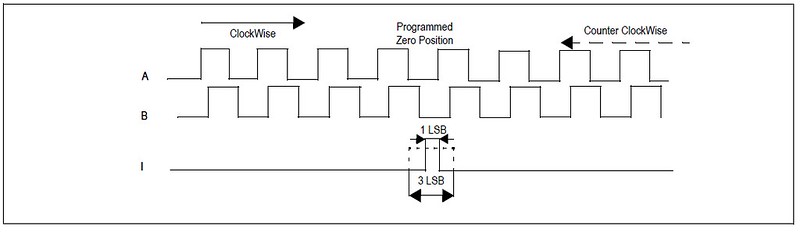
Las señales "A", "B" e "I" son la información en forma de PWMs que la periferia del LPC1769, "Codificador de cuadratura recibe en 3 pins previstos para eso. Dependiendo de cual pin cambia de valor primero se sabe en que dirección gira el eje. La señal "i", o indice la uso para definir cuando la vela está en la posición céntrica. También uso el mismo sensor para monitorear el motor de paso que uso como winche. El índice es activado una vez cada 360° que gire el motor de paso!
Aquí el gráfico que lo muestra.
Fogonazo, al que mucho apreció, le tengo que refutar lo que dice! Motores de paso si pueden perder pasos, con lo que motores de paso ya no están en la posición que se estima a razón de como opero el motor de paso.
Una razón para que sea muy común lo que escribe Fogonazo y que también explica el porqué un forista escribió: "Ah, si conozco motores de paso. Ya me he quemado varias veces tocando uno!" Para evitar que el motor de paso tenga errores de paso una cosa es operarlo lo mas lento que la aplicación permita. El motor de paso pierde su capacidad de torque cuando mas rápido de sus pasos porque la tensión inducida en las bobinas del motor de paso y que es de polaridad opuesta a la polaridad aplicada a la bobina. Así, cuando mas alta es la velocidad de pasos de motor, mas rápido cambia la tensión aplicada a la bobina y mayor es el valor absoluto de la tensión inducida. Así, cuando se va acelerando un motor de paso llega el momento que este se queda varado porque la tensión efectiva en las bobinas no permite alcanzar el torque para que el motor de paso siga dando sus pasos.
Comentario:
Es por eso que cuando escogemos un motor de paso seleccionamos uno que tenga como valor nominal de la tensión, el valor en la placa de tipos o la hoja de datos, lo mas bajo posible. La calidad del motor se define por el valor máximo de la corriente:
P[W] = U[v] * I[A]
Vemos de la ecuación, que si comparamos motores de paso de la misma potencia en Watios, una tensión nominal mas baja requiere compensar esto permitiendo mas corriente para alcanzar la misma potencia! Controladores para motores de paso utilizan circuitos PWM, por ejemplo 2 puntes H dobles, uno para cada bobina en un motor de paso de 2 bobinas paralelas, 4 cables! Estos controladores permiten definir el valor máximo que un motor de paso permite! Digamos 3 Amperios!
Asumamos que la tensión nominal es de 4 VDC:
P[W] = 4 V * 3 A = 12 Watios de potencia!
Si ahora alimentamos las bobinas del motor de paso no con 4 V, sinó con 24 V la potencia tendrá el valor 6 veces mas alto, las PWM se encargan de limitar la corriente a los 3 A permitidos:
P = 24 V * 3 A = 72 W
Si por lo tanto alimentamos nuestro motor continuamente con 24 VDC y 3 A de corriente, el motor no se daña, pero si se calienta. De allí la experiencia del forista que trabajó con motores de paso por décadas!
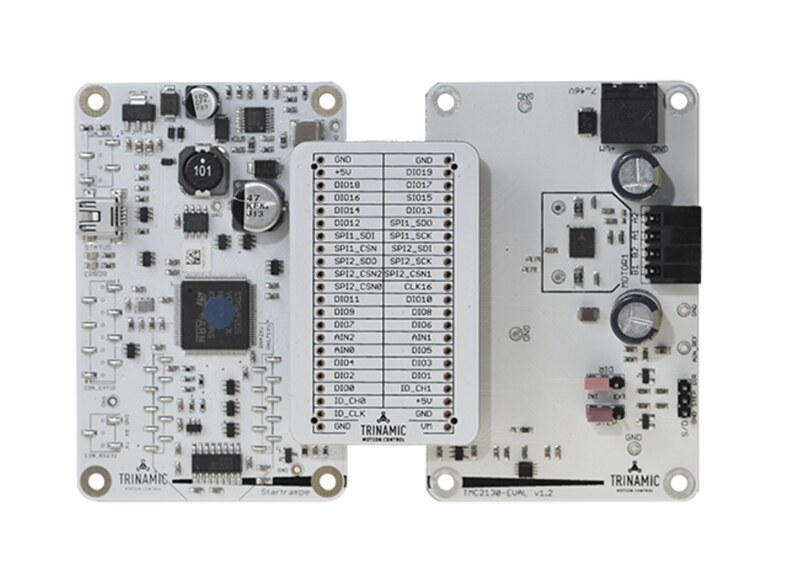
Modernos controladores, yo uso de la empresa Trinamic el controlador para el cual existe este Eval-Kit: TMC2130-Eval
Para no intimidar: Solo la placa a la izquierda es la del controlador para motores de paso. La placa en el centro permite monitorear la comunicación de la placa con un controlador M0 de Freescale, hoy NXP, la placa izquierda. Yo por ejemplo uso un analizador lógico para monitorear la comunicación! Así me es posible ver en acción, siendo decodificados hasta protocolos de buses como el I2C, que ocurre.
Sigo. hoy en día se busca operar motores paso y tener un consumo mínimo de energía. El controlador de Trinamic por ejemplo monitorea la carga del motor de paso analizando la posición exacta del rotor. Cuando mas alto el valor del torque requerido, mas el rotor no estará en la posición ideal que tuviera sin estar sometido a carga. El controlador de paso de Trinamic tiene una función que va adaptando la potencia del motor de paso de acuerdo como este sea solicitado por carga! Así, reduce el valor de la corriente por su control de los PWMs, resultando en menos potencia, lo que ahora consumo de energía y evita el malgaste en forma de originar perdida por calor excesivo! esto permite usar motores de paso de menos potencia, respectivamente que los motores de paso consuman menos energía dando mas tiempo de sistemas a base de baterías!
Como yo en mi velero desarrollo la electrónica y hago los experimentos correspondientes por el puro placer y aprendizaje esto es una de las materias, donde gracias a la IDE gratuita de Trinamic, es posible analizar a fondo lo que es lo que pasa. En mi modelo uso el kit de evaluación de Trinamic que presenté aquí y al mismo tiempo monitoreo la posición actual del motor de paso. Cada vez que la vela gira y pasa por su posición central a lo largo del eje central del casco de mi velero, la señal "I" se activa y así puedo corregir si se presentan diferencias. "I" es activado una vez cada giro de 360°, en el caso de mi uso para monitorear la posición de la vela el índice "I" es activado cada vez que la vela cambia de lado!
Pero también en el caso de operar el motor de paso para monitorear el motor de paso usado como winche comparo si la "posición" del motor de paso, que corresponde a cierto largo de las escotas que controlan la vela mayor y por lo tanto a cierto ángulo del palo de la vela mayor, comparando los valores del sub sistema de monitoreo de la posición de la vela y de la posición del motor de paso en el sub sistema "winche".
Así, un motor de paso operado de forma moderna que busca gastar un mínimo de energía y usar un motor de paso de la menot potencia nominal posible, mas barato, el perder pasos es totalmente factible cuando mas se aproxima a valores de potencia "Mínimos"!