Hola que tal amigos del foro, me gustaria que me ayuden con este problemita que tengo, aqui va.
Me encuentro realizando un proyecto en el cual tengo que recibir datos por 3 puertos RS232, el problema yace en que en algun momento 2 o 3 puertos enviaran sus datos al mismo tiempo o simultaneamente, en caso de presentarse este problema me gustaria recibir todos los datos sin perder ninguno, adjunto una imagen para que me comprendan mejor.
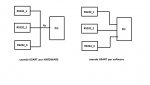
Estube pensando en estos 2 diagramas, pero cada uno tiene problemas.
Usart por harware:
1º - colision de datos
Usart por software:
1º - en cuanto estoy recibiendo 1 dato, pierdo el otro.
Espero q me puedan ayudar, de antemano muchas gracias")
Me encuentro realizando un proyecto en el cual tengo que recibir datos por 3 puertos RS232, el problema yace en que en algun momento 2 o 3 puertos enviaran sus datos al mismo tiempo o simultaneamente, en caso de presentarse este problema me gustaria recibir todos los datos sin perder ninguno, adjunto una imagen para que me comprendan mejor.
Estube pensando en estos 2 diagramas, pero cada uno tiene problemas.
Usart por harware:
1º - colision de datos
Usart por software:
1º - en cuanto estoy recibiendo 1 dato, pierdo el otro.
Espero q me puedan ayudar, de antemano muchas gracias