Hola a todos, quisiera compartir con vosotros un reto que llevaba mucho tiempo detrás de el.
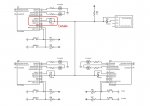
Os explico, a mi siempre me han gustado los sistemas modulares, mas sencillos de configurar y de mantener y hace poco tiempo me prospuse hacer un "invento" el cual lleva 4 partes, la primera parte y principal con un 16f877a y las tres restantes con unos 16f627a.
El funcionamiento es sencillo, cada 16f627a trabaja a su ritmo, si ocurre algo informa al 877a en cualquier momento y el 877a se puede comunicar con cualquier 627a tambien en cualquier momento.
Las pegas, que utilizo 3 pines, dos de datos y uno de estado de linea, cuando alguno quiere transmitir primero comprueba el estado de esa linea, si está en Low la pone en Hi y transmite, el receptor, mediante una ID sabe que le estan hablando a el y responde a las solucitudes, cuando se termina la transmision, el transmisor vuelve a poner la linea en Low.
Por ahora lo tengo todo mediante botones, de manera manual, voy a ver si consigo hacerlo de forma automatica para que funcione el pin LineState.
Ahora mismo, el 877a tiene tres botones y tres leds, a grosso modo, en simulacion, sin resistencias ni nada, luego ya le pondré todo lo que le hace falta y probaré.
Bueno, si le das a Btn1 del 877a, se enciende el led de un 627a, si le das a Btn2 se enciende el de otro 627a y con Btn3 pasa lo mismo, ahora, lo mejor de todo es que cada 627a tiene un boton, si le pulsas, pues en el 877a se enciende el Led correspondiente.
Por ahora solo transmite un byte, veremos con tramas mas largas...
os adjunto foto
Se me olvidaba.. jeje.. por ahora solo hay comunicación desde los 627a hacia el 877a o del 877a hacia los 627a, mas adelante veré de que todos "vean" a todos en armonía.
Lo buene que tiene este metodo es que de esta manera puedes conectar tantos pics como quieras.
Os explico, a mi siempre me han gustado los sistemas modulares, mas sencillos de configurar y de mantener y hace poco tiempo me prospuse hacer un "invento" el cual lleva 4 partes, la primera parte y principal con un 16f877a y las tres restantes con unos 16f627a.
El funcionamiento es sencillo, cada 16f627a trabaja a su ritmo, si ocurre algo informa al 877a en cualquier momento y el 877a se puede comunicar con cualquier 627a tambien en cualquier momento.
Las pegas, que utilizo 3 pines, dos de datos y uno de estado de linea, cuando alguno quiere transmitir primero comprueba el estado de esa linea, si está en Low la pone en Hi y transmite, el receptor, mediante una ID sabe que le estan hablando a el y responde a las solucitudes, cuando se termina la transmision, el transmisor vuelve a poner la linea en Low.
Por ahora lo tengo todo mediante botones, de manera manual, voy a ver si consigo hacerlo de forma automatica para que funcione el pin LineState.
Ahora mismo, el 877a tiene tres botones y tres leds, a grosso modo, en simulacion, sin resistencias ni nada, luego ya le pondré todo lo que le hace falta y probaré.
Bueno, si le das a Btn1 del 877a, se enciende el led de un 627a, si le das a Btn2 se enciende el de otro 627a y con Btn3 pasa lo mismo, ahora, lo mejor de todo es que cada 627a tiene un boton, si le pulsas, pues en el 877a se enciende el Led correspondiente.
Por ahora solo transmite un byte, veremos con tramas mas largas...
os adjunto foto
Se me olvidaba.. jeje.. por ahora solo hay comunicación desde los 627a hacia el 877a o del 877a hacia los 627a, mas adelante veré de que todos "vean" a todos en armonía.
Lo buene que tiene este metodo es que de esta manera puedes conectar tantos pics como quieras.
Adjuntos
Última edición: