

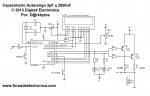
En esta ocasión les traigo un capacímetro autorango con una respuesta desde 3pF hasta 2600uF.
El circuito funciona en base a un microcontrolador PIC16F628A, unos pocos componentes y un LCD 16x2
Para su funcionamiento únicamente se necesita realizar un ajuste sobre un potenciómetro multivueltas.
El circuito funciona en base a un microcontrolador PIC16F628A, unos pocos componentes y un LCD 16x2
Para su funcionamiento únicamente se necesita realizar un ajuste sobre un potenciómetro multivueltas.
Armado y puesta en marcha del circuito:
El circuito debe ser montado preferentemente sobre una placa de fibra de vidrio, aunque funciona muy bien sobre placas fenólicas, e incluso sobre tarjetas perforadas y protoboards.
Después de colocar y soldar perfectamente todos los componentes, se debe colocar el potenciómetro a la mitad de su recorrido y se verifica que las terminales de prueba no estén en corto circuito.
Al encender el aparato por primera vez, deberá mostrar una capacidad muy lejana a 0.00 pF.
Entonces se debe presionar el botón AUTOCAL para que el microcontrolador comience a realizar una autocalibración del sistema dejándolo en 0.00pF y almacenar el valor de calibración en la memoria interna del microcontrolador.
Una vez realizado este procedimiento se necesitará tener algún capacitor de valor conocido, ó mejor aún, un capacitor con baja tolerancia (1%) de los llamados capacitores patrón.
Se coloca este capacitor sobre los terminales de prueba y se reajusta nuevamente el potenciómetro hasta conseguir una lectura lo más aproximada al valor del capacitor de valor conocido.
Si al retirar el capacitor se muestra en la pantalla una capacidad parásita del algunos pocos pico faradios, se presiona nuevamente el botón AUTOCAL para reajustar la desviación.
Con éstos pasos ya debemos tener calibrado nuestro capacímetro y listo para medir capacitores de valor desconocido ó alterados.
Podrán notar que la precisión del circuito es muy elevada y será una herramienta muy útil en su taller.
Adjunto 4 diagramas y su correspondiente programa ejecutable *.hex, que corresponden a dos tipos de oscilador y a dos tipos de pantallas LCD 16x2, para que armen el circuito que más le convenga.
Notas:
Los archivos LCD Estándar son para pantallas genéricas 16x2 del tipo de controlador HD44780.
Y los archivos LMG-162-STN son para este tipo de pantalla China que es muy económica.
La precisión de las lecturas del circuito con oscilador interno es también muy elevada.
Los LED's de muestreo sirven para mostrar actividad del circuito en capacidades altas y bajas.
No se adjuntan los programas ni tampoco los circuitos impresos, quedando en sus manos su diseño.
Espero que este aporte sea de su completo agrado y utilidad.
Saludos y suerte.
Después de colocar y soldar perfectamente todos los componentes, se debe colocar el potenciómetro a la mitad de su recorrido y se verifica que las terminales de prueba no estén en corto circuito.
Al encender el aparato por primera vez, deberá mostrar una capacidad muy lejana a 0.00 pF.
Entonces se debe presionar el botón AUTOCAL para que el microcontrolador comience a realizar una autocalibración del sistema dejándolo en 0.00pF y almacenar el valor de calibración en la memoria interna del microcontrolador.
Una vez realizado este procedimiento se necesitará tener algún capacitor de valor conocido, ó mejor aún, un capacitor con baja tolerancia (1%) de los llamados capacitores patrón.
Se coloca este capacitor sobre los terminales de prueba y se reajusta nuevamente el potenciómetro hasta conseguir una lectura lo más aproximada al valor del capacitor de valor conocido.
Si al retirar el capacitor se muestra en la pantalla una capacidad parásita del algunos pocos pico faradios, se presiona nuevamente el botón AUTOCAL para reajustar la desviación.
Con éstos pasos ya debemos tener calibrado nuestro capacímetro y listo para medir capacitores de valor desconocido ó alterados.
Podrán notar que la precisión del circuito es muy elevada y será una herramienta muy útil en su taller.
Adjunto 4 diagramas y su correspondiente programa ejecutable *.hex, que corresponden a dos tipos de oscilador y a dos tipos de pantallas LCD 16x2, para que armen el circuito que más le convenga.
Notas:
Los archivos LCD Estándar son para pantallas genéricas 16x2 del tipo de controlador HD44780.
Y los archivos LMG-162-STN son para este tipo de pantalla China que es muy económica.
La precisión de las lecturas del circuito con oscilador interno es también muy elevada.
Los LED's de muestreo sirven para mostrar actividad del circuito en capacidades altas y bajas.
No se adjuntan los programas ni tampoco los circuitos impresos, quedando en sus manos su diseño.
Espero que este aporte sea de su completo agrado y utilidad.
Saludos y suerte.
Adjuntos
-
CapMeter LCD Stándar Int_Osc.rar99.9 KB · Visitas: 547
-
CapMeter LCD Standár Xtal.rar106.1 KB · Visitas: 468
-
CapMeter LMG-162-STN Int_Osc.rar101.2 KB · Visitas: 371
-
CapMeter LMG-162-STN Xtal.rar104.3 KB · Visitas: 361
-
 LCD Stándar XTal SCH.jpg122.9 KB · Visitas: 891
LCD Stándar XTal SCH.jpg122.9 KB · Visitas: 891 -
 LCD Stándar Int_Osc SCH.jpg116.2 KB · Visitas: 744
LCD Stándar Int_Osc SCH.jpg116.2 KB · Visitas: 744
 . Solo me confundió que la salida de voltaje del capacitor esta a un pin que puede ser entrada analógica y al parecer cuando trabajas con x, todo tiene x.
. Solo me confundió que la salida de voltaje del capacitor esta a un pin que puede ser entrada analógica y al parecer cuando trabajas con x, todo tiene x. 
