

En esta ocasión, les comparto otra modificación que realizamos a petición, se trata de un Brazo Robot de Steren (OWI), el cuál se controla desde la PC en tiempo real, utilizando para ello el Protocolo de Comunicaciones RS232.
El Equipo consta de lo siguiente:
a) Kit Brazo Robot de OWI (Steren).
b) Interfaz de Comunicación y Control, que incluye en esta ocasión:
1.- Fuente de poder, 1.2 Amperes, 5VCD y 9VCD.
2.- Conversor RS232 con MAX232.
3.- Unidad de control a base de PIC16F873A.
4.- Módulo de potencia con puentes H, L293D.
El Control se realiza desde el Teclado de la computadora, para lo cual, se dispone de las teclas como sigue:
Motor 1 se activa con "Q" (controla el giro)
Motor 2 se activa con "W" (controla brazo principal)
Motor 3 se activa con "E" ( controla brazo basculante)
Motor 4 se activa con "R" (controla la "muñeca")
Motor 5 se activa con "T" (controla apertura y cierre de la pinza)
Todos los motores se desactivan con la barra espaciadora.
Para el control de dirección, en el caso de los Motores 2, 3 y 4 se utilizan las flechas del block numérico: "8" es arriba, "2" es abajo.
Para el Motor 1 (giro), se utiliza igualmente el block numérico: "4" es izquierda, "6" es derecha.
Para el Motor 5 se utiliza "C" para cerrar la pinza, y "A" para arbir la pinza.
En el caso de la lámpara, se utiliza "L" para encenderla y "O" para apagarla.
Les dejo el enlace para ver el video de demostración:
Igualmente les envío unas fotografias y les comparto el esquemático para quien guste realizarlo.
Reciban saludos!
El Equipo consta de lo siguiente:
a) Kit Brazo Robot de OWI (Steren).
b) Interfaz de Comunicación y Control, que incluye en esta ocasión:
1.- Fuente de poder, 1.2 Amperes, 5VCD y 9VCD.
2.- Conversor RS232 con MAX232.
3.- Unidad de control a base de PIC16F873A.
4.- Módulo de potencia con puentes H, L293D.
El Control se realiza desde el Teclado de la computadora, para lo cual, se dispone de las teclas como sigue:
Motor 1 se activa con "Q" (controla el giro)
Motor 2 se activa con "W" (controla brazo principal)
Motor 3 se activa con "E" ( controla brazo basculante)
Motor 4 se activa con "R" (controla la "muñeca")
Motor 5 se activa con "T" (controla apertura y cierre de la pinza)
Todos los motores se desactivan con la barra espaciadora.
Para el control de dirección, en el caso de los Motores 2, 3 y 4 se utilizan las flechas del block numérico: "8" es arriba, "2" es abajo.
Para el Motor 1 (giro), se utiliza igualmente el block numérico: "4" es izquierda, "6" es derecha.
Para el Motor 5 se utiliza "C" para cerrar la pinza, y "A" para arbir la pinza.
En el caso de la lámpara, se utiliza "L" para encenderla y "O" para apagarla.
Les dejo el enlace para ver el video de demostración:
Igualmente les envío unas fotografias y les comparto el esquemático para quien guste realizarlo.
Reciban saludos!
Adjuntos
-
 DSC01006.JPG269.8 KB · Visitas: 111
DSC01006.JPG269.8 KB · Visitas: 111 -
 DSC01005.JPG277.8 KB · Visitas: 88
DSC01005.JPG277.8 KB · Visitas: 88 -
 DSC00996.JPG294.3 KB · Visitas: 74
DSC00996.JPG294.3 KB · Visitas: 74 -
 DSC00989.JPG251.8 KB · Visitas: 92
DSC00989.JPG251.8 KB · Visitas: 92 -
 DSC00992.JPG252 KB · Visitas: 66
DSC00992.JPG252 KB · Visitas: 66 -
 DSC00980.JPG295.7 KB · Visitas: 64
DSC00980.JPG295.7 KB · Visitas: 64 -
 DSC00984.JPG251.6 KB · Visitas: 62
DSC00984.JPG251.6 KB · Visitas: 62 -
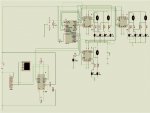 Esquematico_Brazo_RS232.jpg47.5 KB · Visitas: 120
Esquematico_Brazo_RS232.jpg47.5 KB · Visitas: 120
