Los encoders están probados y no pongo nada que antes no haya probado. Tengo a mi lado un encoder en protoboard con otro diseño más simplificado todavía gracias a los sensores hall porque voy a meter un diseño nuevo. No se puede acusar de algo si no lo pruebas. Que hayas probado otros encoder de otras webs que sí fallan es cierto, a mi tb me pasó cuando comencé. Hace 4 años de eso, por eso me decidí a hacer mis propios diseños.
El encoder por Hardware que publico no existe en ninguna web - que yo sepa -. Los míos salió de mi cabeza tras muchos meses de pruebas y error, y por supuesto: No falla y quien lo pruebe lo podrá decir.
Estaría bien que si sabéis cómo hacer otro tipo de encoder, el encoder de doble pulso del que habláis, pongáis el esquema o la web para poder verlo, así todos aprendemos algo nuevo.
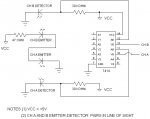
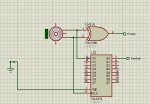
Sobre el encoder por PIC, también salió de mi cabeza usar la interrupción RB0 y que cada vez que detectaba un flanco (sea de subida o de bajada) cambiase el registro INTEDG. Usar la RB0 y el registro INTEDG en cada flaco, tampoco lo he visto en ninguna web, pero al ser programación puede ser que ya haya más de 100 personas que se les haya ocurrido porque es la única forma de hacerlo bien sin perder pulsos (y hasta cierta velocidad de giro) y sin electrónica externa añadida más que el acondicionador de señal para las foto-barreras (un 7414 o 74LS14), cosa que con sensores Hall de la familia A110xx ni siquiera hace falta eso porque ya lleva dentro de su electrónica un disparador Schmitt integrado.
Alguien habló de sobre cargas. De momento no he visto humo por ninguna parte...
Tampoco uso malla de aislamiento ni nada parecido, y funciona perfectamente en una protoboard. Sobre la malla de aislamiento sólo lo imagino en cables largos, es decir, cable con malla de protección que sí se usa cuando entre el sensor y el circuito hay una cierta distancia y pueda sufrir ruido externo.
Sobre hacer publicidad de mi web, sólo tendría sentido si vendiera algo, cosa que como podrás comprobar no vendo nada. Sólo me dedico a explicar experiencias para que otros que han estado como yo no tengan que volverse loco con el Google buscando. Permito que Google pueda publicar un anuncio y lo hago como algo ético como pago por ofrecerme un espacio donde poder publicar mis inquietudes y poder compartirlas. Los anuncios de Google que yo he visto son dos y nunca, al menos a mi, no cambia. Uno es sobre los micro-créditos y parece ser que está relacionado con el tercer mundo. El otro es sobre energía solar pero no sé mucho más. Ambos son presentados en inglés. Hace casi dos años que abrí la web y hasta el día de hoy no he ganado nada. Y si tienes dudas, te puedo demostrar esto porque Google lo registra todo y mi web tiene registro en Google Analytics.
Yo uso mucho los foros, sobre todo para programación porque siempre me he considerado un auto-didacta en programación y tengo muchas preguntas que hacer. Hay preguntas que es mejor responderlas explicándolo todo y en un foro yo lo veo más para responder rápido. Es la misma diferencia que mirar un diccionario o empaparse en una enciclopedia. Por suerte la mayoría de las veces no es así y no hace falta ir a ninguna web, pero en mi caso, para exponer 4 tipos de Algoritmo de Bresenham (2D, 3D, hasta 6D y DDA), para explicar la cinemática inversa con ejemplos (2 grados de libertad(con ejemplos de tipo "Scara" y otro sobre el brazo cilíndrico), 3 grados y 5 grados de libertad), pienso que sería muy engorroso explicar eso en un foro por el gran espacio que se necesita. Los foros está bien para hayar la respuesta sea en el propio foro o recomendando una web donde explica con detalle el problema que uno tiene. Yo no consigo ver como problema esto.
Sobre denunciar lo que publico, tienes todo el derecho a hacerlo si así lo piensas. Yo ahí no quiero meterme. Cada ser humano es una conciencia y no voy a juzgar la tuya. Lo que sí haré siempre es quitarme del medio acusaciones que no son ciertas.
Hace mucho tiempo me echaron de Robots Perú, por cierto, una buena web con foro incluido. Pensaron al igual que tu que me publicito y se debatió si ganaba o no dinero con ello. Lo comprobaron, cosa que reconocieron que no, pero aún así me echaron. No me dieron muchas explicaciones, tampoco yo las pedí. Pero entiendo que ellos venden Lego (materiales y talleres) y que si viene alguien diciéndote de cómo hacerlo por ti mismo puedes menoscabar un poco su negocio. Yo entendí que ellos defienden su negocio y así lo tomé, pues están en su perfecto derecho.
También estoy en otra web con foro sobre Basic Stamp (y venden todo tipo de materiales para la robótica) y pese a que en ningún momento hablo de Basic Stamp nunca he tenido problemas con ellos, más bien todo lo contrario, en momentos muy puntuales me ha pedido colaboración.
Podéis seguir haciendo publicidad para menoscabar la información que doy, no entraré más en ese juego. Muy rara vez, por mail, me han criticado y "puesto a parir" profesores de informática por que les ha sucedido que muchos presentan trabajos copiados directamente desde mi web, sin tener la precaución de darle un toque personal o modificar ciertas cosas, sobre todo en cuanto a simulación de brazos robot.