En el año 2001 (antes de la aparición del segway) yo me puse a experimentar tratando de
hacer un carrito de 2 ruedas que mantuviera el equilibrio. (No es por agrandarme, porque
no tuve éxito.)
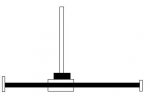
Como sensor de la vertical puse una barrita metálica pequeña a modo de péndulo.
Colgaba de un extremo, y con el otro tapaba parcialmente un optocoplador de ranura.
El opto a 1/2 iluminar mantenía un PWM en un 50% de ciclo util, que controlaba un motor de CC
ubicado en la base del aparato.
Al mover el péndulo sensor y tapar más o menos el opto, el PWM hacía mover el motor en un sentido o en otro, con diferente velocidad. Ese era mi lazo de realimentación negativa para restablecer la vertical.
Pero los problemas eran varios:
1.- el sensor era demasiado sensible (muy rápido)
2.- el motor muy poco potente (poco torque de respuesta)
3.- la referencia del lazo era inadecuada, ya que el sensor medía el ángulo,
y debía medir la aceleración.
Por supuesto que anduve renegando como una semana, hasta que me di cuenta que no
tenía forma de resolver esos problemas.
El método de medir la distancia hacia tierra con un sensor óptico merece ser probada,
ya que es una manera de medir la otra referencia importante: si se acerca al piso o no.
La clave está en que el motor pueda responder lo suficientemente rápido a la señal de realimentación, que esta no tenga ruido, y que sea proporcional a la aceleración lateral.
Hay otros aspectos físicos a tener en cuenta (como el tema de diferenciar la componente
de g, de la aceleración del movimiento) pero básicamente lo anterior es lo principal
desde el punto de vista del control.
Si yo tuviera tiempo trataría de perfeccionar mi método del pendulo como sensor, ya que
así es como trabaja el sistema de equilibrio del cuerpo humano.
Los "otolitos", situados en el oído interno, son como péndulos que flotan en un líquido
muy viscoso (lo que amortigua el movimiento). Las cilias que los unen al fondo de la cavidad
le indican al cerebro en qué dirección está la horizontal (o vertical).
Este es un tema apasionante.