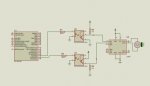
miren lo que pasa es lo siguiente, tengo un pic18f4550 y un l293d para mover un motor, estableci como entradas los pines del b0 al b3 y a0 al a3, mi intencion es que cuando presione el boton 1(b0) el motor arranque y cuando un optointerruptor(a0) detecte señal de entrada el motor de me apague y asi sucesivamente en las demas entradas, ya hice un programa en pic c y no me marca error al compilarlo, el problema es que no me respeta las señales de entrada ya busque informacion en internet pero no encontre nada, aqui les dejo el programa para ver si me pueden ayudar, muchas gracias