

Hola colegas del foro...
estoy elaborando un control de posicion para un motor DC de 12V con encoder de cuadratura.
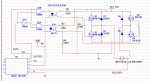
El sistema es controlado por un DSPIC 30F4012, de donde sale un PWM y el control de posicion. Éste va conectado a un arreglo con compuertas (ya que en la salidas del DsPIC voy a tener 1 y 0), que a su vez van conectados a unos autocopladores, estos al puente H, y este al motor. Luego el encoder me manda una señal al DsPIC.
El objetivo es posicionar el eje del motor a 90° (como tipo pendulo), osea que cuando gire hacia un lado nomas llegue a 90° y cuando gire para el otro igual... nose si me explique...
de cualquier forma les dejo mi circuito y el modelo del DsPIC en Simulink.... espero y me puedan ayudar... saludos
... con lo que tengo problemas es con el modelo en Simulink... es de acuerdo a como le entendi... pero nose si este bien...
estoy elaborando un control de posicion para un motor DC de 12V con encoder de cuadratura.
El sistema es controlado por un DSPIC 30F4012, de donde sale un PWM y el control de posicion. Éste va conectado a un arreglo con compuertas (ya que en la salidas del DsPIC voy a tener 1 y 0), que a su vez van conectados a unos autocopladores, estos al puente H, y este al motor. Luego el encoder me manda una señal al DsPIC.
El objetivo es posicionar el eje del motor a 90° (como tipo pendulo), osea que cuando gire hacia un lado nomas llegue a 90° y cuando gire para el otro igual... nose si me explique...
de cualquier forma les dejo mi circuito y el modelo del DsPIC en Simulink.... espero y me puedan ayudar... saludos
... con lo que tengo problemas es con el modelo en Simulink... es de acuerdo a como le entendi... pero nose si este bien...
Adjuntos

Última edición: