controlador motor paso a paso con 16f84a
Buenas a todos
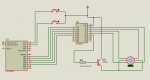
se que es un tema ya visto muchas veces.... pero quisiera su opinion en general del circuito.
A los que se preguntan porque uso un transistor para controlar el motor...
eso es para luego poder usar las mismas salidas de la secuencia de giro en un segundo motor que aqui no se encuentra. pero tambien se activaría por un segundo transistor saturado correspondiente a ese segundo motor.
dependiendo de cual transistor decida saturar.. se seleccionará el motor
la resistencia del transistor todavía no la eh calculado
el motor es unipolar pequeño, si bien todavía no me ehe fijado en las características técnicas, supongo que rondará en algo menos de 500mA (cuando sepa cuanto exactamente calcularé las resistencias de saturación)
el 6to bit que se mantiene constante en la salida de los puertos B es el que se dirige a saturar el transistor y activar el motor
con respecto al mismo (el transistor) pido una sugerencia si hay alguno mas adecuado para esto que el 2n2907
Buenas a todos
se que es un tema ya visto muchas veces.... pero quisiera su opinion en general del circuito.
A los que se preguntan porque uso un transistor para controlar el motor...
eso es para luego poder usar las mismas salidas de la secuencia de giro en un segundo motor que aqui no se encuentra. pero tambien se activaría por un segundo transistor saturado correspondiente a ese segundo motor.
dependiendo de cual transistor decida saturar.. se seleccionará el motor
la resistencia del transistor todavía no la eh calculado
el motor es unipolar pequeño, si bien todavía no me ehe fijado en las características técnicas, supongo que rondará en algo menos de 500mA (cuando sepa cuanto exactamente calcularé las resistencias de saturación)
el 6to bit que se mantiene constante en la salida de los puertos B es el que se dirige a saturar el transistor y activar el motor
con respecto al mismo (el transistor) pido una sugerencia si hay alguno mas adecuado para esto que el 2n2907
Código:
main
PDel0 equ 0x0C
PDel1 equ 0x0D
STATUS equ 0x03
TRISB equ 0x86
TRISA equ 0x85
PORTB equ 0x06
PORTA equ 0x05
bsf STATUS,5
movlw 00h
movwf TRISB
movlw 0xFF
movwf TRISA
bcf STATUS,5
movlw 00h
movwf PORTA
leer
btfsc PORTA,0 ;si hay un 1
goto der ; ir a derecha
btfsc PORTA,1 ;si hay un 1
goto izq ; ir a izquierda
goto leer
der movlw b'00100110'
movwf PORTB
call wait
movlw b'00100100'
movwf PORTB
call wait
movlw b'00101100'
movwf PORTB
call wait
movlw b'00101000'
movwf PORTB
call wait
movlw b'00111000'
movwf PORTB
call wait
movlw b'00110000'
movwf PORTB
call wait
movlw b'00110010'
movwf PORTB
call wait
movlw b'00100010'
movwf PORTB
call wait
movlw b'00000000'
movwf PORTB
goto leer ;CHEKEAR SI SE ESTA APRETANDO DERECHA
izq
movlw b'00100010'
movwf PORTB
call wait
movlw b'00110010'
movwf PORTB
call wait
movlw b'00110000'
movwf PORTB
call wait
movlw b'00111000'
movwf PORTB
call wait
movlw b'00101000'
movwf PORTB
call wait
movlw b'00101100'
movwf PORTB
call wait
movlw b'00100100'
movwf PORTB
call wait
movlw b'00100110'
movwf PORTB
call wait
movlw b'00100000'
movwf PORTB
goto leer ;CHEKEAR SI SE ESTA APRETANDO DERECHA
wait movlw .239 ; 1 set numero de repeticion (B)
movwf PDel0 ; 1 |
PLoop1 movlw .232 ; 1 set numero de repeticion (A)
movwf PDel1 ; 1 |
PLoop2 clrwdt ; 1 clear watchdog
PDelL1 goto PDelL2 ; 2 ciclos delay
PDelL2 goto PDelL3 ; 2 ciclos delay
PDelL3 clrwdt ; 1 ciclo delay
decfsz PDel1, 1 ; 1 + (1) es el tiempo 0 ? (A)
goto PLoop2 ; 2 no, loop
decfsz PDel0, 1 ; 1 + (1) es el tiempo 0 ? (B)
goto PLoop1 ; 2 no, loop
PDelL4 goto PDelL5 ; 2 ciclos delay
PDelL5 goto PDelL6 ; 2 ciclos delay
PDelL6 goto PDelL7 ; 2 ciclos delay
PDelL7 clrwdt ; 1 ciclo delay
return ; 2+2 Fin.
END ; directive 'end of program'