
Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.

Nota: This feature currently requires accessing the site using the built-in Safari browser.
Estás usando un navegador obsoleto. No se pueden mostrar este u otros sitios web correctamente.
Se debe actualizar o usar un navegador alternativo.
Se debe actualizar o usar un navegador alternativo.
Encender/apagar luz con control remoto
- Autor geto
- Fecha de inicio
aaahh estamos hablando de los pines de I/O "entrada o salida" del pic, no de puertos, hay una gran diferencia entre puerto y pin I/O. A eso me refiero. Ya que tu sigues mencionando 33 puertos, desde el principio estamos hablando de 33 pines I/O creo que es lo correcto y no 33 puertos.
 tienes razón, lamento mi expresión errónea XD, es que aun no soy "Ingeniero" para no equivocarme, saludos!!!!
tienes razón, lamento mi expresión errónea XD, es que aun no soy "Ingeniero" para no equivocarme, saludos!!!!Aca te dejo un circuito super sencillo para que lo puedas hacer. Consta con componentes que lo podes conseguir en cualquier lado.Tiene un alcanze de 6 y 8 metros. Lo probe y funciona a la perfección. Cualquier duda que tengas avisame.
Saludos

eh echo el circuito y no funciona, lo probe con el protoboard y nada. Una de las cosas que hice fue comprar un relay de 12v pero 10A entonces al circuito lo bajo con un 7805, desde hay tengo 5v todo el circuito y 12 en el relay, ahora cuando lo conecto a la fuente, el relay funciona pero con el control remoto nada, aclaro que compre un receptor de tv de 38k.
Kelphes, debes tener algo mal conectado, revisaste si llega la señal y si se activa el transistor, etc...No solo se trata de armar el circuito y esperar que funcione y ya, estudia el circuito y ve si realmente no esta funcionando y que es lo que no funciona.
aparte:
Hay pic de muchos puertos están los 24f como el PIC24FJ128GA010, que cada puerto es de 16bits, con solo 2 puertos tendrías 32 pines I/O, y tienes en total 84 I/O, y están los pic32xxxxxx, que también rondan en ese rango aparte de tener de todo por dentro, usb, eternet, etc...en fin puedes conseguir muchos el problema esta en el costo, la programación, etc.
aparte:
Hay pic de muchos puertos están los 24f como el PIC24FJ128GA010, que cada puerto es de 16bits, con solo 2 puertos tendrías 32 pines I/O, y tienes en total 84 I/O, y están los pic32xxxxxx, que también rondan en ese rango aparte de tener de todo por dentro, usb, eternet, etc...en fin puedes conseguir muchos el problema esta en el costo, la programación, etc.
Voy a comprar los componentes ahora mismo.
Cuando el circuito no te funciona, el mando puede funcionarte a 36 KHz y usas el sensor de 38 KHz. Procura que coincida los dos a la misma frecuenca, ese es el motivo.
Si quieres ver cositas aquí con el RS232....
http://migsantiago.com/index.php?option=com_content&view=article&id=7&Itemid=8
Una revisión mini del esquema.
En el relé lleva un rectificador 1N4007, aunque es válido, en realidad lleva el 1N4148 que es mucho más rápido que el 1N4007.
El Led verde en realidad va en paralelo con su resisrencia al relé para saber si realemente funciona. Puede encenderse el LEd verde tal como está sin que el relé haga algo.
Unas preguntas y hola de nuevo.
He intentado comprar el CD4017 y me dieron el HEF4017BP que dice que es el normalito.
1) ¿Realmente es el mismo IC como me han dicho en el local?
Otra cosa que me toca las narices es que no tiene nada del TSOP1738 ni el SHF5110-38.
2) ¿Sirve cualquier receptor para este circuito de controlar el relé?
Eso es todo por ahora.
Cuando el circuito no te funciona, el mando puede funcionarte a 36 KHz y usas el sensor de 38 KHz. Procura que coincida los dos a la misma frecuenca, ese es el motivo.
Si quieres ver cositas aquí con el RS232....
http://migsantiago.com/index.php?option=com_content&view=article&id=7&Itemid=8
Una revisión mini del esquema.
En el relé lleva un rectificador 1N4007, aunque es válido, en realidad lleva el 1N4148 que es mucho más rápido que el 1N4007.
El Led verde en realidad va en paralelo con su resisrencia al relé para saber si realemente funciona. Puede encenderse el LEd verde tal como está sin que el relé haga algo.
Unas preguntas y hola de nuevo.
He intentado comprar el CD4017 y me dieron el HEF4017BP que dice que es el normalito.
1) ¿Realmente es el mismo IC como me han dicho en el local?
Otra cosa que me toca las narices es que no tiene nada del TSOP1738 ni el SHF5110-38.
2) ¿Sirve cualquier receptor para este circuito de controlar el relé?
Eso es todo por ahora.
Última edición:
1) ¿Realmente es el mismo IC como me han dicho en el local?
Es el mismo, ambos son contadores de decadas
2) ¿Sirve cualquier receptor para este circuito de controlar el relé?
Cualquier receptor sirve si es capaz de sensar señales de 38 kHz, pero deberas ver la forma en que se conecta ya que no todos se conectan de la misma forma
.
Gracias por las respuestas.

Aquí hay uno que no se si sirve y cuesta 4.30 €. Carísimo para lo que es.
http://www.parallax.com/StoreSearch...List/0/SortField/4/ProductID/177/Default.aspx
Voya buscar más por ahí. Menos mal que este integrado HEF4017BP me funciona igual.
Aquí hay uno que no se si sirve y cuesta 4.30 €. Carísimo para lo que es.
http://www.parallax.com/StoreSearch...List/0/SortField/4/ProductID/177/Default.aspx
Voya buscar más por ahí. Menos mal que este integrado HEF4017BP me funciona igual.
Kelphes, debes tener algo mal conectado, revisaste si llega la señal y si se activa el transistor, etc...No solo se trata de armar el circuito y esperar que funcione y ya, estudia el circuito y ve si realmente no esta funcionando y que es lo que no funciona.
aparte:
Hay pic de muchos puertos están los 24f como el PIC24FJ128GA010, que cada puerto es de 16bits, con solo 2 puertos tendrías 32 pines I/O, y tienes en total 84 I/O, y están los pic32xxxxxx, que también rondan en ese rango aparte de tener de todo por dentro, usb, eternet, etc...en fin puedes conseguir muchos el problema esta en el costo, la programación, etc.
Intento en conseguir una PIC con 33 puertos barata y que su programación no sea compleja XD, en mi país la 16f877A esta a 10 dolares, algo adecuado para mi bolsillo, el programador lo poseo, y conozco como se comporta esa PIC en la realidad, por eso mencione ese µC jiijji, saludos!!!!
respecto de ese circuito receptor, me parece a mi o el sensor es simplemente un IR ???
o acaso ya tiene incluido el filtro que discrimina la frecuencia en su interior??
sino sera sensible a casi cualquier fuente de luz.
o no ??
Solamente a LUZ IR saludos!!!!
y la luz comun esta compuesta tambien por IR asi que seguimso en la misma
por eso tambien es la fre3cuencia de TX
`por eso el rx deberia tener un filtro
Lo mismo desia yo hasta que me di cuenta en la practica que era falso eso, si la luz ambiental afectara en el funcionamiento del foto-transistor, el control de un TV al controlar una TV no funcionaria debido a que bloquearía la frecuencia, por eso el foto-transistor tiene una clase de "lente" oscuro, que bloquea cualquier fuente de luz que no sea IR pura, actualmente aquí poseo unos lentes de un mouse IR y al mirar atravez de ella directamente a la luz, no se puede apreciar (se bloquea) pero al apuntar a una luz IR se observa claramente (con la debida cámara claro), bueno, una observación de algo practico que hice una vez XD, saludos!!!!
yo hace tiempo realice uno y me funciono hasta 15 metros mas o menos apuntando directo con el control remoto lo monte en un protoboard, el circuito era mas complejo ya que era para otra finalidad, pero utilice solamente la parte que recibe y activa la salida en función a eso le adapte un opto triac MOC, y un triac y lo realice solo para probarlo pero después desistí ya que el circuito era muy grande y lo pienso hacer con un pic12f675 o 16f629 que la circuiteria es menor y ocupa menos espacio aparte de poder decodificar el los comandos del control remoto para mas opciones, en fin les dejo una imagen del circuito probado por mi que les doy fe de que si funciona ya que lo monte y probé y como dije me funciono hasta 15 metros, de echo estando a 2 o 3 metros y colocándome de espalda y apuntando en contra igual recibía la señal y lo activaba, ese fue otro motivo por el cual no me convenció mucho ya que cualquier control que estuviera cerca así no se apuntara directo al receptor lo activaba. Espero y les sirva como base el circuito ...saludosss
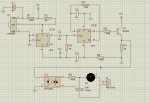
PD: el transistor Q1 hace de SOP2837 ya que no esta en el proteus.
PD: el transistor Q1 hace de SOP2837 ya que no esta en el proteus.
Adjuntos

Última edición:
fernandob
Excluido
che disculpa pero que feo se ve ese circuito, tarde en darme cuenta que el simbolo de masa que normalmente uno lo manda a negativo parece que representa en este caso positivo o +vcc y el primer ff , que tiene D y CK y R ya a un potencial , sin posibilidad de nada.... solo setearlo ....y el sensor ?? ...........
pero que feo que esta simbolicamente .
pero que feo que esta simbolicamente .
Última edición:
si realmente ese era el símbolo de GND que tenia esa versión de proteus, y nada mas veo D Y CLK del primer ff, el R del primer ff esta a vcc, y ya que dices que esta feo voy a tratar de arreglarlo para que se aprecie mejor, mas no era mi intencion que se viera bonito si no era para hacer el pcb...dame un rato y lo pongo bonito...Ahora nos dió a todos hacer cosas de estas del relé con mando. Jejeje..

http://www.xbot.es/microplans/control_ir_8.htm
http://www.xbot.es/microplans/control_ir_8.htm
Ya esta el circuito espero ahora si sea mas agradable a la vista, cualquier cosa extraña que vean en el circuito me avisan y les respondo sin ningún problema.
Pequeña explicación del circuito:
El circuito lo diseñe en base a una serie de circuitos que tenia ya probados y otros.
La primera parte es la realice en función a la hoja de datos del SOP28XX la cual indica
como conectar el componente de manera tal que sea la mas optima para la recepción.
La resistencia de 100ohm a VCC es para alimentar el SOP.
El condensador es (recommended to suppress power supply disturbance) información dada por la misma hoja del componente.
Y la resistencia de 10K o mayor a 10K? igualmente la hoja de datos.
Osea toda esa primera parte es gracias a la información dada por la hoja de datos del SOP28xx.
Ahora la parte de los FF tipo D, este es otro circuito que fue una prueba de uno ya realizado el cual no recuerdo de donde exactamente lo saque.
Funcionamiento:
La idea de todo el circuito es lograr realizar un cambio a la salida y mantenerlo.
Quiere decir que si en la salida es 0 lógico, si se recibe un pulso a la entrada esto genera un cambio en la salida a 1 lógico y lo mantiene a pesar de dejar de recibir el pulso.
Ahora si analizamos bien eso se puede lograr con un solo FF.
Pero que pasa, que el cambio no se mantendría ya que al dejar de recibir el pulso este cambiaría de estado.
Por eso se utilizaron 2 FF.
Por otro lado esta que por lo general en un diseño de circuitos digitales siempre se evalúa la primera condición o primer estado de los circuitos, esto es en el encendido.
Si energizamos el circuito en que estado va iniciare? Para eso se condiciona el circuito para que empiece siempre en un estado ya sea 1 ó 0 lógico.
Como se logra? De varias maneras, pero principalmente con un reset o set, osea que al energizar el circuito inmediatamente se resetee o setee y así lograr un estado inicial.
Por otro lado esta el clock de los FF con lo cual no funcionaria el circuito ya que no cambiaría de estado.
Esto se logra gracias a que los FF tiene la condición de obviar las entradas cuando se utiliza el set y el reset con lo cual también se puede lograr cambiar el estado de las salidas del FF sin necesidad de un clock.
Ahora no siempre el circuito obvia las entradas, (este caso D y Clock son las entradas), solamente cuanto se activa set y reset, entonces que pasa el resto del tiempo cuando no se activan, para eso se colocaron a GND tanto el clock como D asi de esta forma siempre mantenemos un estado inicial después de cada pulso recibido.
Ahora el segundo FF tiene 3 funciones principales:
Recibir la señal
Mantener el estado a la salida.
Y al igual que el anterior debe de tener un estado inicial en este caso lo que nos interesa es este a 0V la salida y por lo tanto lo condicionamos para que su estado inicial sea 0V con un reset al inicio con C3 y luego lo mantenemos a 0V con R4 para que trabaje de modo normal.
El segundo FF recibe la señal cuando la salida del primer FF cambia de estado 1 a 0 y el condensador C2 se descarga.
Cambia de estado de 0 a 1 y lo mantiene.
Ahora la mayoría de los controles no envían un solo pulso envían un tren de pulso y a 38,37,36,Khz.
Como hacemos para no tener un sistema intermitente, de eso se encarga R5 y C4, da un tiempo suficiente como para que a pesar de recibir un tren de pulso este se active una sola vez cada n cantidad de pulsos permitiendo así solo un cambio cada vez que se presione el control remoto.
Ventajas:
Diseño practico.
De alto alcance. Mis pruebas alcanzaron mas o menos unos 15 metros.
Económico.
Estable. En ningún momento le afecto ninguna luz, ni el sol, ni lamparas.
Desventajas:
A pesar de ser estable con lo de las luces y el sol, es tan sensible que se activa con cualquier control, así se apunte el control para el lado opuesto de donde este el receptor eso si se esta al rededor de 2 o 3 metros igual toma la señal y se activa.
De momento es la única desventaja que se me ocurre ya que si hablo de pic y cantidad de componentes es otra cosa.
El resto del circuito puro diseño en base a pruebas y circuitos que ya tenia armado, en si son bastantes comunes, a partir de la salida del segundo FF pueden adaptar lo que deseen ya que no compromete el funcionamiento de lo demás.
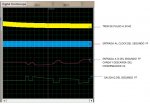
Anexo la imagen del circuito y la simulación de las señales para que tengan una idea de lo descrito. En la imagen de las señales la entrada del tren del pulso la hice a 3khz ya que no me pude hacerlo a 36khz en el proteus.
Espero buenas criticas y me disculpo por el esquema que coloque arriba ya que no lo había detallado...saludosss
Pequeña explicación del circuito:
El circuito lo diseñe en base a una serie de circuitos que tenia ya probados y otros.
La primera parte es la realice en función a la hoja de datos del SOP28XX la cual indica
como conectar el componente de manera tal que sea la mas optima para la recepción.
La resistencia de 100ohm a VCC es para alimentar el SOP.
El condensador es (recommended to suppress power supply disturbance) información dada por la misma hoja del componente.
Y la resistencia de 10K o mayor a 10K? igualmente la hoja de datos.
Osea toda esa primera parte es gracias a la información dada por la hoja de datos del SOP28xx.
Ahora la parte de los FF tipo D, este es otro circuito que fue una prueba de uno ya realizado el cual no recuerdo de donde exactamente lo saque.
Funcionamiento:
La idea de todo el circuito es lograr realizar un cambio a la salida y mantenerlo.
Quiere decir que si en la salida es 0 lógico, si se recibe un pulso a la entrada esto genera un cambio en la salida a 1 lógico y lo mantiene a pesar de dejar de recibir el pulso.
Ahora si analizamos bien eso se puede lograr con un solo FF.
Pero que pasa, que el cambio no se mantendría ya que al dejar de recibir el pulso este cambiaría de estado.
Por eso se utilizaron 2 FF.
Por otro lado esta que por lo general en un diseño de circuitos digitales siempre se evalúa la primera condición o primer estado de los circuitos, esto es en el encendido.
Si energizamos el circuito en que estado va iniciare? Para eso se condiciona el circuito para que empiece siempre en un estado ya sea 1 ó 0 lógico.
Como se logra? De varias maneras, pero principalmente con un reset o set, osea que al energizar el circuito inmediatamente se resetee o setee y así lograr un estado inicial.
Por otro lado esta el clock de los FF con lo cual no funcionaria el circuito ya que no cambiaría de estado.
Esto se logra gracias a que los FF tiene la condición de obviar las entradas cuando se utiliza el set y el reset con lo cual también se puede lograr cambiar el estado de las salidas del FF sin necesidad de un clock.
Ahora no siempre el circuito obvia las entradas, (este caso D y Clock son las entradas), solamente cuanto se activa set y reset, entonces que pasa el resto del tiempo cuando no se activan, para eso se colocaron a GND tanto el clock como D asi de esta forma siempre mantenemos un estado inicial después de cada pulso recibido.
Ahora el segundo FF tiene 3 funciones principales:
Recibir la señal
Mantener el estado a la salida.
Y al igual que el anterior debe de tener un estado inicial en este caso lo que nos interesa es este a 0V la salida y por lo tanto lo condicionamos para que su estado inicial sea 0V con un reset al inicio con C3 y luego lo mantenemos a 0V con R4 para que trabaje de modo normal.
El segundo FF recibe la señal cuando la salida del primer FF cambia de estado 1 a 0 y el condensador C2 se descarga.
Cambia de estado de 0 a 1 y lo mantiene.
Ahora la mayoría de los controles no envían un solo pulso envían un tren de pulso y a 38,37,36,Khz.
Como hacemos para no tener un sistema intermitente, de eso se encarga R5 y C4, da un tiempo suficiente como para que a pesar de recibir un tren de pulso este se active una sola vez cada n cantidad de pulsos permitiendo así solo un cambio cada vez que se presione el control remoto.
Ventajas:
Diseño practico.
De alto alcance. Mis pruebas alcanzaron mas o menos unos 15 metros.
Económico.
Estable. En ningún momento le afecto ninguna luz, ni el sol, ni lamparas.
Desventajas:
A pesar de ser estable con lo de las luces y el sol, es tan sensible que se activa con cualquier control, así se apunte el control para el lado opuesto de donde este el receptor eso si se esta al rededor de 2 o 3 metros igual toma la señal y se activa.
De momento es la única desventaja que se me ocurre ya que si hablo de pic y cantidad de componentes es otra cosa.
El resto del circuito puro diseño en base a pruebas y circuitos que ya tenia armado, en si son bastantes comunes, a partir de la salida del segundo FF pueden adaptar lo que deseen ya que no compromete el funcionamiento de lo demás.
Anexo la imagen del circuito y la simulación de las señales para que tengan una idea de lo descrito. En la imagen de las señales la entrada del tren del pulso la hice a 3khz ya que no me pude hacerlo a 36khz en el proteus.
Espero buenas criticas y me disculpo por el esquema que coloque arriba ya que no lo había detallado...saludosss
Adjuntos
Muy bueno el diseño.
¿No crees que será mejor usar un PIC?
Tiene EEPROM interno por si se va la luz del circuito, al iniciarse vuelve a estar los 8 relés como estaban y no empieza desde cero aunque tenga posibilidad de configurarlo. En tu caso es un relé y no importa.
El PIC puede grabar cada botón del mando con sus trenes de pulso.
http://www.jmnlab.com/receptorir/receptorir.html
http://users.frii.com/dlc/robotics/projects/botproj.htm
¿No crees que será mejor usar un PIC?
Tiene EEPROM interno por si se va la luz del circuito, al iniciarse vuelve a estar los 8 relés como estaban y no empieza desde cero aunque tenga posibilidad de configurarlo. En tu caso es un relé y no importa.
El PIC puede grabar cada botón del mando con sus trenes de pulso.
http://www.jmnlab.com/receptorir/receptorir.html
http://users.frii.com/dlc/robotics/projects/botproj.htm
Código:
; Designed to run at 20MHz
list p=16F877a
#include p16F877a.inc
__CONFIG _CP_OFF & _WDT_OFF & _HS_OSC & _LVP_OFF & _BODEN_OFF
;******************************* DEFINICIONES***************************************************
#DEFINE LED1 PORTA,3 ;Rojo
#DEFINE LED2 PORTA,5 ;Azul
#DEFINE LED3 PORTC,5 ;Verde
#DEFINE PULSADOR2 PORTA,1
#DEFINE DATO0 PORTD,0
#DEFINE DATO1 PORTD,1
#DEFINE DATO2 PORTD,2
#DEFINE DATO3 PORTD,3
#DEFINE DATO4 PORTD,4
#DEFINE DATO5 PORTD,5
#DEFINE DATO6 PORTD,6
#DEFINE DATO7 PORTD,7
#DEFINE ENABLE PORTE,2
#DEFINE RS PORTE,0
#DEFINE W_R PORTE,1
#DEFINE LCD_DATOS PORTD
#DEFINE LCD_CTRL PORTE
#DEFINE IR PORTB,0
#DEFINE PIN_PRUEBA PORTA,0
#DEFINE PIN_PRUEBA2 PORTA,2
#DEFINE PIN_PRUEBA3 PORTC,0
;****************************** REGISTROS RAM ***************************************************
cblock 0x20
Delay0 ; Assign an address to label Delay1
Delay1
Delay2
Delay3
DELAY4
DELAY5
W_TEMP
STATUS_TEMP
CUENTA
UNIDADES
DECENAS
CENTENAS
DATO1IR
DATO2IR
TICTAC
INT_CONTROL
INT_CONTROL_OLD
CONTADOR1
endc
;**************************** POSICIONES *********************************************************
ORG 0 ; Posición de memoria donde se coloca la instrucción.
GOTO Start ; Salto a Start, se ejecutará la instrucción debajo de Start.
ORG 4
GOTO ISR
ORG 5 ; Salta el vector de interrupción
;***************************** CONFIGURAR REGISTROS ************************************************
Start ; Inicio del programa
; ****************** BANCO 0 **************************************************************
BCF STATUS, RP0
BCF STATUS, RP1 ; Seleciona el Bank0
CLRF PORTA ; Initialize poerts by clearing output
CLRF PORTB ; data latches
CLRF PORTC
CLRF PORTD
CLRF PORTE
MOVLW B'10010000'
MOVWF INTCON ;GIE e INTE, bit 1 flag de INTE
; ******************** BANCO 1 **************************************************************
BSF STATUS,RP0 ; select Register Page 1
BCF OPTION_REG,INTEDG ;Flanco de bajada
MOVLW B'00000000' ;Interruptores son entradas
MOVWF TRISA
MOVLW B'00000001'
MOVWF TRISB
CLRF TRISC
CLRF TRISD
CLRF TRISE
MOVLW 0X06 ;Configurar los pin de A
MOVWF ADCON1 ;como entradas digitales.
BCF STATUS, RP0 ;Bank0
;************************ INICIO PROGRAMA ****************************************************************
BSF LED2 ;Parpadeo de Reset
CALL Delay_2
BCF LED2
CALL INICIALIZA_LCD
MOVLW B'00000001' ;Clear Display
CALL LCD_COMANDO
MOVLW B'00000110' ;Entry mode set
CALL LCD_COMANDO
MOVLW B'00001110' ;Activa lcd y cursor
CALL LCD_COMANDO
BCF PIN_PRUEBA2
BCF PIN_PRUEBA
;************************** PROGRAMA PRINCIPAL ********************************************************
MAIN_LOOP
BSF LED1
CALL Delay_2
BCF LED1
CALL Delay_2
GOTO MAIN_LOOP
;*************************** INTERRUPCIONES*************************************************************
ISR
MOVWF W_TEMP ;Salva W y Status
SWAPF STATUS,0
MOVWF STATUS_TEMP
BSF LED2
BCF LED1
BCF LED3
CLRF TICTAC
CLRF DATO1IR
CLRF DATO2IR
CLRF CONTADOR1
CLRF INT_CONTROL ;bit 7 entrada IR, bit 3 y 4 cambio de byte y salida, bit 0:2 contador
CLRF INT_CONTROL_OLD
BCF PIN_PRUEBA
BCF PIN_PRUEBA2
BCF PIN_PRUEBA3
ISR_LOOP
; ********* Se mira el pin de entrada, si no cambia se va a SUBIR_TIC ************************
BTFSS IR ;Si es cero se ejecuta la siguiente,PORTB,0 ;0.2
GOTO PONER_A_CERO ;---->0.6
BSF INT_CONTROL,7 ;0.6
GOTO COMP_ENTRADA ;---->1
PONER_A_CERO ;<----0.6
NOP ;0.8
BCF INT_CONTROL,7 ;1
COMP_ENTRADA ;<----1
MOVFW INT_CONTROL_OLD ;1.2
XORWF INT_CONTROL,W ;Si son iguales Z=1 ;1.4
BTFSS STATUS,Z ;Si es 0 se ejecuta la siguiente ;1.6
GOTO COMPARAR_TIC ;--->2
;************************** Incrementar el TIC **********************************************************
NOP ;2
NOP ;2.2
NOP ;2.4
NOP ;2.6
SUBIR_TIC ;<--2.6
NOP ;2.8
MOVLW D'140' ;1 Tics = 0.1 mS ;3
SUBWF TICTAC,W ;3.2
BTFSC STATUS,C ;Si TICTAC-W mayor que 0, ejecuta la siguiente ;3.6
GOTO ERROR_IR ;
INCF TICTAC,F ;3.8
;
MOVLW D'158' ;4
MOVWF DELAY5 ;4.2
Delay_5loop ;3*0.2*158=94.8
DECFSZ DELAY5,f ;
GOTO Delay_5loop ;
MOVFW INT_CONTROL ;99.2
MOVWF INT_CONTROL_OLD ;99.4
NOP ;99.6
GOTO ISR_LOOP ;100
; ********* El pin de entrada a cambiado, en función de los tics damos 1 o 0 *****************
; ********* TIC menos 0.8 mS error, mayor de 0.8 mS escribir cero, mayor 1.7 mS escribir uno *
; ********** Si es el flanco de subida no comparamos ***************************************
COMPARAR_TIC
BTFSC IR
GOTO SUBIR_TIC
MOVLW D'26' ;1 Tics = 0.1 mS
SUBWF TICTAC,W
BTFSC STATUS,C ;Si TICTAC-W mayor que 0, ejecuta la siguiente
GOTO COMPARAR_SALIDA
MOVLW D'17' ;1 Tics = 0.1 mS
SUBWF TICTAC,W
BTFSC STATUS,C ;Si TICTAC-W mayor que 0, ejecuta la siguiente
GOTO ALMACENAR_UNO
MOVLW D'8' ;1 Tics = 0.1 mS
SUBWF TICTAC,W
BTFSC STATUS,C ;Si TICTAC-W mayor que 0, ejecuta la siguiente
GOTO ALMACENAR_CERO
ERROR_IR
BCF LED2
GOTO POP
COMPARAR_SALIDA
MOVFW INT_CONTROL
MOVWF INT_CONTROL_OLD
CLRF TICTAC
GOTO ISR_LOOP
ALMACENAR_CERO
BTFSC INT_CONTROL,3 ;Si el bit 3 es uno se ejecuta la siguiente, vale 8 o mas.
GOTO ALMACENAR_DATO2
BCF STATUS,C
RLF DATO1IR,F
GOTO ALMACENAR_SALIDA
ALMACENAR_DATO2
BCF STATUS,C
RLF DATO2IR,F
GOTO ALMACENAR_SALIDA
ALMACENAR_UNO
BTFSC INT_CONTROL,3 ;Si el bit 3 es uno se ejecuta la siguiente, vale 8 o mas.
GOTO ALMACENAR_DATO2_1
BCF STATUS,C
RLF DATO1IR,F
INCF DATO1IR,F
GOTO ALMACENAR_SALIDA
ALMACENAR_DATO2_1
BCF STATUS,C
RLF DATO2IR,F
INCF DATO2IR,F
GOTO ALMACENAR_SALIDA
ALMACENAR_SALIDA
INCF INT_CONTROL,F
BTFSC INT_CONTROL,4 ;Si el bit 4 es uno se ejecuta la siguiente, vale 16 o mas.
GOTO DATOS_A_LCD
GOTO COMPARAR_SALIDA
DATOS_A_LCD
MOVLW B'10000000'
CALL LCD_COMANDO
MOVFW DATO1IR
CALL BINARIO_LCD
MOVFW CENTENAS
CALL LCD_ESCRIBIR
MOVFW DECENAS
CALL LCD_ESCRIBIR
MOVFW UNIDADES
CALL LCD_ESCRIBIR
MOVLW B'11000000'
CALL LCD_COMANDO
MOVFW DATO2IR
CALL BINARIO_LCD
MOVFW CENTENAS
CALL LCD_ESCRIBIR
MOVFW DECENAS
CALL LCD_ESCRIBIR
MOVFW UNIDADES
CALL LCD_ESCRIBIR
POP
SWAPF STATUS_TEMP,0
MOVWF STATUS
MOVFW W_TEMP
BCF INTCON,INTF
BCF LED2
RETFIE
;********************************** LCD ****************************************************************
INICIALIZA_LCD
CALL Delay
CLRF LCD_CTRL
MOVLW B'00111000' ;8 bits, 2 líneas y 5x8 puntos
MOVWF LCD_DATOS
CALL LCD_E
CALL Delay
RETURN
LCD_E
BSF ENABLE
NOP
NOP
NOP
NOP
NOP
NOP
NOP
NOP
NOP
BCF ENABLE
RETURN
LCD_COMANDO
CLRF LCD_CTRL
MOVWF LCD_DATOS
CALL LCD_E
CALL Delay
RETURN
LCD_ESCRIBIR
CLRF LCD_CTRL
BSF RS
MOVWF LCD_DATOS
CALL LCD_E
CALL Delay
RETURN
;********************************** BINARIO A LCD *****************************************************
BINARIO_LCD ;Para registros de 8 bits, convierte a centenas, decenas y unidades.
MOVWF CUENTA
CLRF UNIDADES
CLRF DECENAS
CLRF CENTENAS
CENT_LOOP
MOVLW D'100'
SUBWF CUENTA,W
BTFSS STATUS,C
GOTO DEC_LOOP
INCF CENTENAS,F
MOVWF CUENTA
GOTO CENT_LOOP
DEC_LOOP
MOVLW D'10'
SUBWF CUENTA,W
BTFSS STATUS,C
GOTO UNIDAD
INCF DECENAS,F
MOVWF CUENTA
GOTO DEC_LOOP
UNIDAD
MOVF CUENTA,W
MOVWF UNIDADES
MOVLW B'00110000'
ADDWF CENTENAS,1
ADDWF DECENAS,1
ADDWF UNIDADES,1
RETURN
;********************************** DELAYS *************************************************************
Delay ;20 mS
MOVLW D'65'
MOVWF Delay1
Delay_loop
decfsz Delay0,f ; Waste time.
goto Delay_loop ; The Inner loop takes 3 instructions per loop * 256 loopss = 768 instructions
decfsz Delay1,f ; The outer loop takes and additional 3 instructions per lap * 256 loops
goto Delay_loop ; (768+3) * 256 = 197376 instructions / 1M instructions per second = 0.197 sec.
; call it a two-tenths of a second.
RETURN
Delay_2 ;0.86 s
MOVLW D'22'
MOVWF Delay2
Delay_2loop
decfsz Delay0,f ; Waste time.
goto Delay_2loop ; The Inner loop takes 3 instructions per loop * 256 loopss = 768 instructions
decfsz Delay1,f ; The outer loop takes and additional 3 instructions per lap * 256 loops
goto Delay_2loop ; (768+3) * 256 = 197376 instructions / 1M instructions per second = 0.197 sec.
; call it a two-tenths of a second.
decfsz Delay2,f
goto Delay_2loop
return
Delay_3 ;50.2 uS
MOVLW D'82'
MOVWF Delay3
Delay_3loop
DECFSZ Delay3,f
GOTO Delay_3loop
RETURN
endTemas similares
- Respuestas
- 3
- Visitas
- 542
- Respuestas
- 17
- Visitas
- 3K
- Respuestas
- 3
- Visitas
- 632
- Respuestas
- 16
- Visitas
- 2K
- Respuestas
- 8
- Visitas
- 724