Hola que tal
Buscando en varios foros se me complico encontrar una respuesta a mi pregunta. Espero alguien pueda ayudarme o simplemente opinar sobre el problema que tengo. Seria bueno escuchar los problemas comunes que se tienen con el control de servos y sus soluciones.
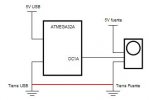
Tengo algunos servos, he intentado hacerlos funcionar con un micro ATMEGA32A, estoy utilizando el timer1 y puedo controlar sin problema un par de pequeños servos pero no he tenido éxito con el resto que son de tamaño estándar y uno a 1/4 de escala.
Es como si no hubiera señal, simplemente no se mueven; pero cuando separo las tierras del ATMEL y la del servo este se se mueve hacia un extremo y ahí se queda, al volver a unir las tierras el servo se apaga como si no hubiera señal. Suena como si fuera un problema de conexión, pero todo esta bien conectado y eso me pasa con todos mis servos salvo con los pequeños. Uno de ellos es completamente nuevo de hecho.
La señal pwm que envío tiene 50Hz y vario la duración del pulso de 1 a 2ms, los servos son Hitec y parallax y la alimentación es 5V y 3A max.
Me agradaría escuchar opiniones, gracias.
Buscando en varios foros se me complico encontrar una respuesta a mi pregunta. Espero alguien pueda ayudarme o simplemente opinar sobre el problema que tengo. Seria bueno escuchar los problemas comunes que se tienen con el control de servos y sus soluciones.
Tengo algunos servos, he intentado hacerlos funcionar con un micro ATMEGA32A, estoy utilizando el timer1 y puedo controlar sin problema un par de pequeños servos pero no he tenido éxito con el resto que son de tamaño estándar y uno a 1/4 de escala.
Es como si no hubiera señal, simplemente no se mueven; pero cuando separo las tierras del ATMEL y la del servo este se se mueve hacia un extremo y ahí se queda, al volver a unir las tierras el servo se apaga como si no hubiera señal. Suena como si fuera un problema de conexión, pero todo esta bien conectado y eso me pasa con todos mis servos salvo con los pequeños. Uno de ellos es completamente nuevo de hecho.
La señal pwm que envío tiene 50Hz y vario la duración del pulso de 1 a 2ms, los servos son Hitec y parallax y la alimentación es 5V y 3A max.
Me agradaría escuchar opiniones, gracias.