Hola compañeros!!
Escribo aca porque no se en que tema va esta pregunta, pero pienso utilizar esto en un proyecto de electronica, asi que no me cierren el tema.
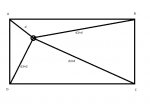
Yo lo que necesito es, sabiendo las coordenadas de las esquinas de un rectangulo, y posicionando un punto dentro del mismo, saber como calcular la posicion de ese punto.
Hay alguna formula trigonometrica para hacerlo? Ya pense varias cosas, pero no llegue a nada por ahora, alguien me podria ayudar?
Gracias!!!
Escribo aca porque no se en que tema va esta pregunta, pero pienso utilizar esto en un proyecto de electronica, asi que no me cierren el tema.
Yo lo que necesito es, sabiendo las coordenadas de las esquinas de un rectangulo, y posicionando un punto dentro del mismo, saber como calcular la posicion de ese punto.
Hay alguna formula trigonometrica para hacerlo? Ya pense varias cosas, pero no llegue a nada por ahora, alguien me podria ayudar?
Gracias!!!