


Buenas tardes ")
Primero, decir que me estoy iniciando en esto del ensamblador y los pics, asique si veis alguna burrada es vil causa de la ignorancia...
Estoy practicando con un pic12c509a que ha caido en mis manos y desde el principio he tenido bastantes problemas (alguna instruccion diferente, registros distintos..)... en la red hay mucho del pic16 y muy poco del pic12, pero como soy un poco cabezota me he mamado el datasheet y he hecho lo que he podido...
Estoy usando MPLAB X y Proteus
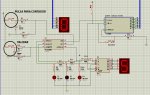
El programa/circuito consta de dos partes:
La primera parte registra las pulsaciones de un pulsador y aumenta un contador que se resetea al pasar de 5. El programa comprueba el numero de pulsaciones y si es mayor de 5 , resta 5 para que coincida con el valor mostrado en el lcd7seg de pulsaciones (0-4).
-esta parte va bien-
La segunda parte deberia de, al pulsar un boton de "validacion", enviar un HIGH a traves de las 3 diferentes salidas segun la parte anterior. Para verificar esto, he conectado las 3 salidas a un deco 7seg y de este a otro lcd7seg, así , al "validar" se deberia mostrar un digito igual al mostrado en la primera parte.
- esta parte no me va bien-
El problema:
cuando selecciono el 0 y valido, muestra un 0
cuando selecciono el 1 y valido, muestra un 1 (exepto si mantengo pulsado el "validador" que me muestra un 1 que por un brevisimo instante se transforma en un 3)
cuando selecciono el 2,3 y 4 y valido, muestra un 1 (exepto si mantengo pulsado el "validador" que me muestra un 1 que por un brevisimo instante se transforma en un 3)
..edito... ahora muestra un 4 en los valores de 1,2,3 y 4
Algunas cuestiones:
- He probado a crear tablas de mil formas diferentes, pero al simularlas en el proteus me dan "error violation acces..." o simplemente no funcionan
-Casi todo esta con goto's porque no entiendo muy bien el tema de los stacks? y siempre me daba error en cuanto ponia un call más
-He simulado "step by step" mil veces el programa en MPLAB, pero o no se, o no va buscar como cambian los registros GPIO y TRIS (el resto (W,Z, PC...)si que veo como cambian). Incluso he probado el Real Pic Simulator.. el caso es que en las tablas donde se muestran siempre me salen como 00000000.. no cambian
Las preguntas:
-¿Que error tengo en mi codigo?
-Como puedo mejorar lo que funciona?
-¿Puedo ver los valores de GPIO (si estan en 1 o 0) y TRIS (si estan como In o Out) y si es si, donde?
Muchas gracias por el interes
Esta es la tabla que me da error en Proteus de"internal exception: violation in module 'PIC12C5.DLL' [10008CAE]"
Primero, decir que me estoy iniciando en esto del ensamblador y los pics, asique si veis alguna burrada es vil causa de la ignorancia...
Estoy practicando con un pic12c509a que ha caido en mis manos y desde el principio he tenido bastantes problemas (alguna instruccion diferente, registros distintos..)... en la red hay mucho del pic16 y muy poco del pic12, pero como soy un poco cabezota me he mamado el datasheet y he hecho lo que he podido...
Estoy usando MPLAB X y Proteus
El programa/circuito consta de dos partes:
La primera parte registra las pulsaciones de un pulsador y aumenta un contador que se resetea al pasar de 5. El programa comprueba el numero de pulsaciones y si es mayor de 5 , resta 5 para que coincida con el valor mostrado en el lcd7seg de pulsaciones (0-4).
-esta parte va bien-
La segunda parte deberia de, al pulsar un boton de "validacion", enviar un HIGH a traves de las 3 diferentes salidas segun la parte anterior. Para verificar esto, he conectado las 3 salidas a un deco 7seg y de este a otro lcd7seg, así , al "validar" se deberia mostrar un digito igual al mostrado en la primera parte.
- esta parte no me va bien-
El problema:
cuando selecciono el 0 y valido, muestra un 0
cuando selecciono el 1 y valido, muestra un 1 (exepto si mantengo pulsado el "validador" que me muestra un 1 que por un brevisimo instante se transforma en un 3)
cuando selecciono el 2,3 y 4 y valido, muestra un 1 (exepto si mantengo pulsado el "validador" que me muestra un 1 que por un brevisimo instante se transforma en un 3)
..edito... ahora muestra un 4 en los valores de 1,2,3 y 4
Algunas cuestiones:
- He probado a crear tablas de mil formas diferentes, pero al simularlas en el proteus me dan "error violation acces..." o simplemente no funcionan
-Casi todo esta con goto's porque no entiendo muy bien el tema de los stacks? y siempre me daba error en cuanto ponia un call más
-He simulado "step by step" mil veces el programa en MPLAB, pero o no se, o no va
buscar como cambian los registros GPIO y TRIS (el resto (W,Z, PC...)si que veo como cambian). Incluso he probado el Real Pic Simulator.. el caso es que en las tablas donde se muestran siempre me salen como 00000000.. no cambianLas preguntas:
-¿Que error tengo en mi codigo?
-Como puedo mejorar lo que funciona?
-¿Puedo ver los valores de GPIO (si estan en 1 o 0) y TRIS (si estan como In o Out) y si es si, donde?
Código:
list p = 12C509A
include <P12C509A.inc>
__CONFIG _IntRC_OSC & _WDT_OFF & _CP_OFF & _MCLRE_OFF ; desactivo el MCLR para poder usar ese pin
#define outdeco GPIO, 0 ;ahora GPIO-0 se llamara outdeco
#define validator GPIO, 3 ; el boton de validacion se llamara validator
#define inboton GPIO, 1 ; el boton selector se llamara inboton
#define gp2 GPIO, 2 ; 2 , 3 y 4 son los pines de salida para el 7seg
#define gp4 GPIO, 4
#define gp5 GPIO, 5
ledcontador equ 07h ;declaracion de variables a usar
CounterA equ 08h ;variables para el delay
CounterB equ 09h
CounterC equ 0Ah
;+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
;++++++++++++++++++ EMPIEZA ++++++++++++++++++++
;+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
org 0x00 ; inicio del programa
goto start ; saltamos a start
;+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
;++++++++++++++++++++++ TABLA PARA LOS NUMEROS ++++++++++++++++++++++++
;+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
;no hay nada porque me daba error en el proteus
;+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
start ; Configuracion de I/O y clear de pines
;+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
movlw b'001010' ; carga el literal en W (1=ONLY IN 0=OUT)
tris GPIO ;y lo pasa al puerto GPIO configurando GP1 y GP3 como entradas
;y el resto como salidas
clrf GPIO ; asi tambien dejamos todos los bits de GPIO en low
clrf ledcontador ; lo limpiamos porque aparecia un 255 en el File Register ?¿
;al simularlo
movlw b'11001000' ; 11 pullups y wakeon desactivadas, el otro 1 es para el wdt off
OPTION ; si no meto esto no va bien (no tengo muy claro q este bien)
;+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
loop ;bucle de comprobacion del accionamiento del boton ++++++++++++++++++++++
;+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
btfsc inboton ;Comprueba el bit 0 de GPIO (GP1) si esta 1 y si lo está salta linea
goto sumayon
btfss inboton ;Comprueba que el bit 0 de GPIO (GP1) esta a 0 y si tal salta
nop ;sigue el programa
btfsc validator ;Comprueba q GP3 esta a 0 (boton SI presionado) y llama funcion
goto callplay ;Funcion callplay para iniciar juego seleccionado
btfss validator ;Si GP3 esta a 1 (boton SIN presionar) go loop
nop ; Una vez tenemos un numero de juego elegido lo activamos
goto loop ; el bucle se repite hasta que hay pulsaciones
;+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
;++++++++++ RUTINA DE SELECCION Y COMPROBACION ++++++++++++++++++
;+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
sumayon bsf outdeco ; Pone en SET outdeco (GP0) o sea mete un flanco de subida..
call delay1sec ; espera 1 sec aprox
call delay1sec
bcf outdeco ; ..Pone en CLEAR outdeco (gp0) (termina el PULSO al CLK del contador)
incf ledcontador, 1 ; +1 al contador de seleccion de juego y se almacena en El
nop
; Snippet: 8-bit if (A >= 5) BUCLE QUE COMPRUEBA QUE LEDCONTADOR NO SEA
; MAYOR QUE 5, Y SI LO ES, LO RESTA PARA QUE CONCUERDE CON EL LED
movlw 5
subwf ledcontador, W ; W = A-5
btfss STATUS, C ; Check for borrow..
goto loop ; SI es NO C=0, A<5, GOTO loop
; SI es SI RESTAMOS A LEDCONTADOR 5 Y SE LO REASIGNAMOS.
decf ledcontador,1
decf ledcontador,1
decf ledcontador,1
decf ledcontador,1
decf ledcontador,1
goto loop
;+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
;++++++++++++++++++++++ RUTINA DE ACTIVACION JUEGO ELEGIDO +++++++++++++++++
;+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
si0 movf ledcontador, W
subwf b'00000000', W ; W = B-A
btfsc STATUS, Z ; Check if zero..
goto sisi0
goto si1 ; Z=0, A != B, result is si1
sisi0 movlw b'000000'
movwf GPIO
goto loop
si1 bcf STATUS, Z
movf ledcontador, 0
subwf b'00000001', 0 ; W = B-A
btfsc STATUS, Z ; Check if zero..
goto sisi1
goto si2 ; Z=0, A != B, result is sinoes
sisi1 bsf gp5
bsf gp4
bsf gp2
goto loop
si2 movf ledcontador, 0
subwf b'00000010', 0 ; W = B-A
btfsc STATUS, Z ; Check if zero..
goto sisi2
goto si3 ; Z=0, A != B, result is sinoes
sisi2 bcf gp5
bsf gp4
bcf gp2
goto loop
si3 movf ledcontador, W
subwf b'00000011', W ; W = B-A
btfsc STATUS, Z ; Check if zero..
goto sisi3
goto si4 ; Z=0, A != B, result is sinoes
sisi3 bcf gp5
bsf gp4
bsf gp2
goto loop
si4 movf ledcontador, W
subwf b'00000100', W ; W = B-A
btfsc STATUS, Z ; Check if zero..
goto sinoes ; Z=0, A != B, result is sinoes
sisi4 bsf gp5
bcf gp4
bcf gp2
goto loop
;+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
;++++++++++++++++++++++ RUTINA DE DELAY +++++++++++++++++
;+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
delay1sec movlw D'2' ; OJO HE CAMBIADO EL 6 POR EL 2 (ya NO es 1 sec)
movwf CounterC ; el 3er contador no lo usare, pero dejo q cargue el valor
movlw D'24'
movwf CounterB
movlw D'168'
movwf CounterA
looping
decfsz CounterA,1
goto looping
decfsz CounterB,1
goto looping
decfsz CounterC,1 ; NO quito (SI modifico) el ultimo contador porque 1s es mucho
goto looping
return
endMuchas gracias por el interes
Esta es la tabla que me da error en Proteus de"internal exception: violation in module 'PIC12C5.DLL' [10008CAE]"
Código:
callplay
addwf PCL ; GP5 GP4 GP2
retlw b'00000000' ;0 0 0 0
retlw b'00000100' ;1 0 0 1
retlw b'00010000' ;2 0 1 0
retlw b'00010100' ;3 0 1 1
retlw b'00100000' ;4 1 0 0
endAdjuntos
Última edición: