hola que tal.estoy haciendo un siguelineas pero tengo un problema con los motores.
lo que pasa es que cuando conecto la bateria al circuito los motoreductores se ponen muy duros. como si algo les quitara velocidad.
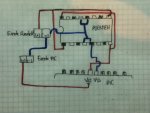
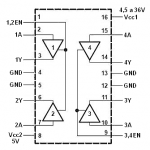
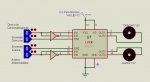
lo ise con un pic y el l293d y como eldriver necesita voltaje externo pues lo puse con una bateria diferente a la del pic solo uni las tierras y fue todo
que podria ser? D:
gracias")
lo que pasa es que cuando conecto la bateria al circuito los motoreductores se ponen muy duros. como si algo les quitara velocidad.
lo ise con un pic y el l293d y como eldriver necesita voltaje externo pues lo puse con una bateria diferente a la del pic solo uni las tierras y fue todo
que podria ser? D:
gracias