
Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.

Nota: This feature currently requires accessing the site using the built-in Safari browser.
Estás usando un navegador obsoleto. No se pueden mostrar este u otros sitios web correctamente.
Se debe actualizar o usar un navegador alternativo.
Se debe actualizar o usar un navegador alternativo.
PWM y motor lavadora.
- Autor Meta
- Fecha de inicio
La verdad es que no se que tiene, si puedo paso por un negocio y les pido una para sacarle unas fotografías. Por lo pronto dejo un vídeo de la instalación
Las nuevas plaquetas que están haciendo con conexión a teléfono.
La pagina oficial http://www.rpelectronica.com.ar/
Buena placa que compraron. Un argentino conocido por aquí, en estos foros, me vino a mi casa y me enseñó placas de esas. Parecen sencillas, y yo volviéndome loco.
Lo que me toca las narices son dos cosas, entender muy bien el tacómetro analógico y los sensores de presión, antes presostatos. Si fuera solo presostato es más fácil, ahora su sustituro sensor de presión.
Cuando tenga todo el hardware en mis manos, es cuando ya empezamos a programar.
Gracias por las informaciones de la placa y los vídeos que han puesto aquí. Otro está haciendo placas pero no suelta mucho detalla.
https://forum.arduino.cc/index.php?topic=511520.0
Saludos.
Lo que me toca las narices son dos cosas, entender muy bien el tacómetro analógico y los sensores de presión, antes presostatos. Si fuera solo presostato es más fácil, ahora su sustituro sensor de presión.
Cuando tenga todo el hardware en mis manos, es cuando ya empezamos a programar.
Gracias por las informaciones de la placa y los vídeos que han puesto aquí. Otro está haciendo placas pero no suelta mucho detalla.
https://forum.arduino.cc/index.php?topic=511520.0
Saludos.
Última edición por un moderador:
pandacba
Recordado
En general esas placas manejan todo con relés, y en el caso del motor con enconder viene la placa para el control, que tiene todo el pic programado, el scr, es decir conectas directamente, todo trabaja a 220, ya esta previsto, la fuente para el pic y las R y zener para las entradas, es muy sencillo de implementar porque es el mismo que venía para los lavarropas con reloj electomecánico.
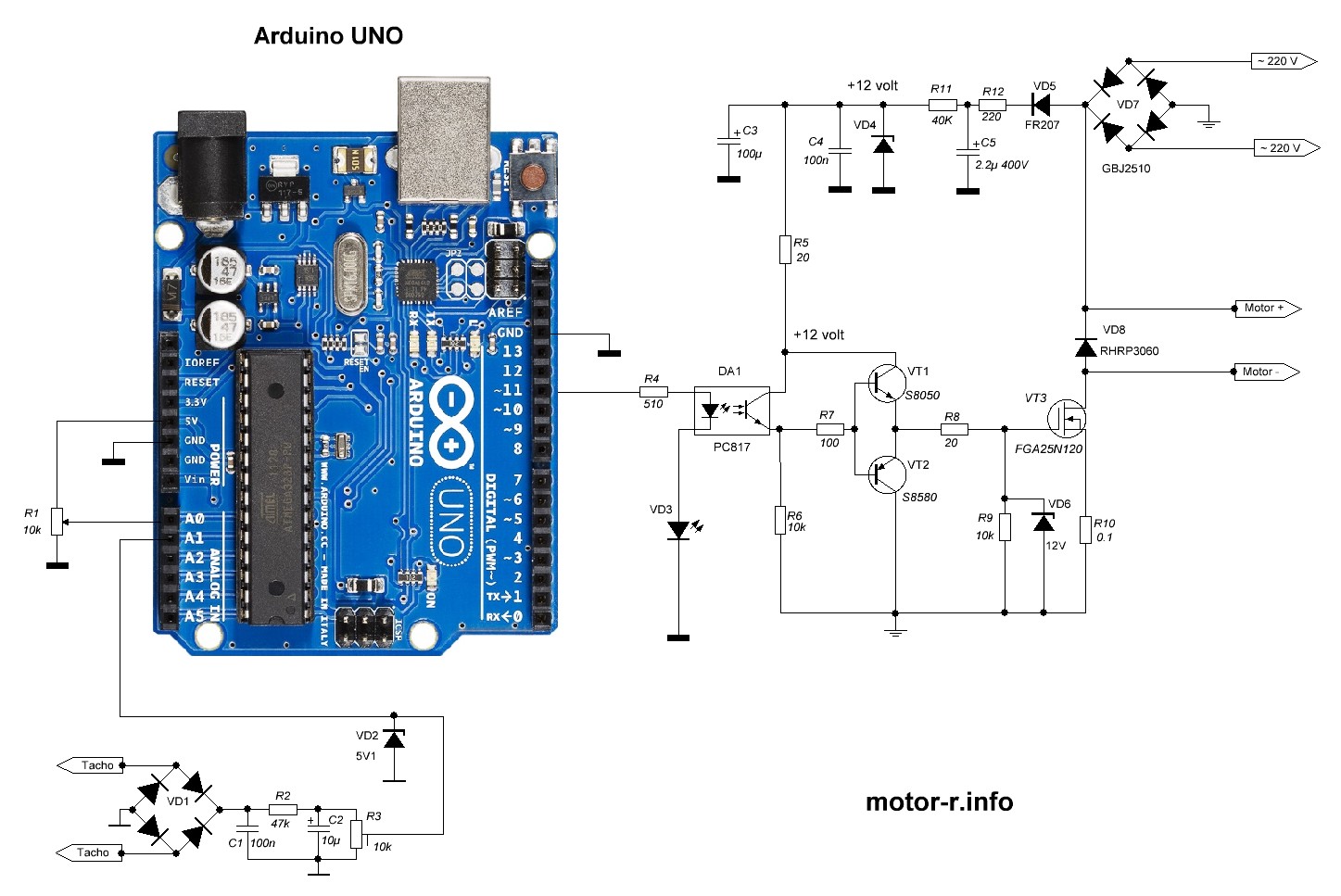
Me parece que la solución es mas fácil de lo que pensas, y si la velocidad la controlas con un amplificador diferencial?, una de las entradas va al micro con un opto acoplador y la otra va al tacometro, tendría fuerza al arrancar y luego, una vez que se envuelta el motor la señal del tacometro bajaría la potencia.
Algo asi,
con algunas modificaciones,claro.
Algo asi,
con algunas modificaciones,claro.
En definitiva que es lo que te falta?, si se te complica el tacometro porque no colocas un sensores Hall en el motor, el imán ya lo tenes.
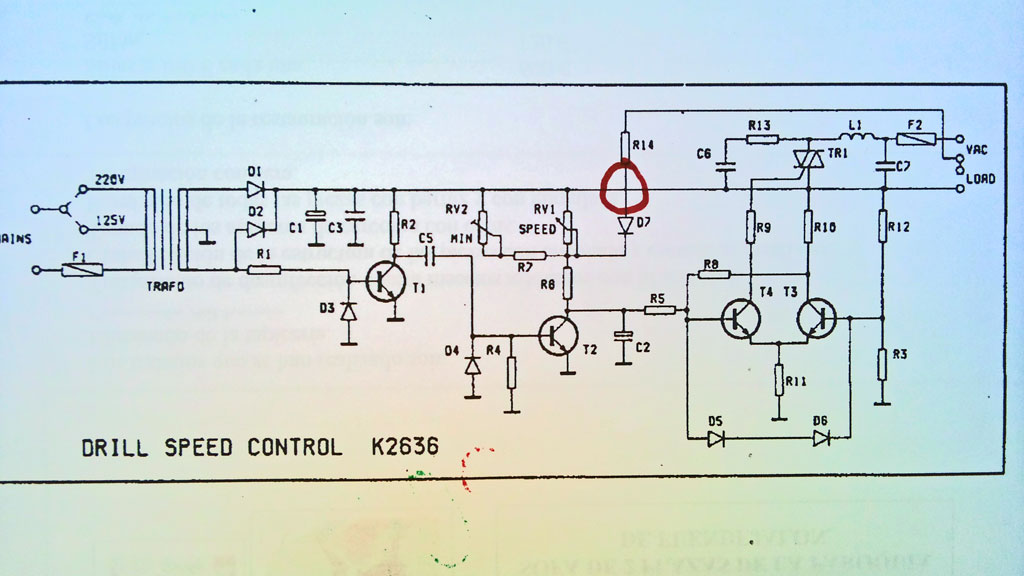
Creo que tengo la solución a tu problema, funcionamiento.
Son 3 vídeos, no hace falta que ponga los enlaces, son correlativos.
El circuito del tacometro

El circuito del tacometro
Buenísima la información que acabas dar.


Esto si que son esquema muy simple. Uno de los motores que tengo coge 98 VAC del tacómetro en su máxima velocidad conectadoa 230 VAC en España.
Haré experimento con ese esquema, sobre todo el segundo ya que el primero tengo que estar seguro porque el que uso es Arduino UNO. Tengo varios PIC16F84A, PIC16F88, PIC16F886/886, PIC18F2550/4550.
Tiene dos resistencias de 10 KΩ y uno de 1 KΩ.
¿De cuánta potencia (W) son?
A parte de todo eso y las explicacones con Arduino de esa Web. Quiero hacer pruebas con Arduino y aprovecho ya que tengo la LCD incluido para mostrar información.
Saludos.
Última edición:
Estas seguro que son 98 vac ?. Es posible que el multimetro o tester te de cualquier cosa por la frecuencia, no son 50 hz. Coloca un puente rectificador a la salida del tacometro y un capacitor, hace la medición sobre el capacitor en dcv.
Las resistencias tendrían que ser de 1/2 watts. No se que dicen los demás.
Las resistencias tendrían que ser de 1/2 watts. No se que dicen los demás.
La verdad es que no se cual es el más aconsejable, es mas, no se nada de programación y microcontroladores, solamente te pase lo que encontré en san google tras la búsqueda en barios idiomas. Por lógica te diría que vayas a un taller de linea blanca y le pidas que te regalen las plaquetas quemadas de lavarropas, igual la tiran. "Levantando" el circuito del tacometro y el detector de cruce vas a ver como resuelven el problema los que saben. Este que te pase es el del lavarropas samsung,
Como estas para el idioma Ruso Meta?, parecen iguales pero son 2 vídeos distintos y correlativos, muy bien explicado 
En esta pagina está la programación del micro http://shenrok.blogspot.com.ar/p/blog-page_10.html
Habrá que experimentar, muy buena documentación has sacado, ejejjeje. En cuanto al ruso, pues...
Este puede ayudar.
https://translate.google.com/
Te puedes ar una oportunidad a ti mismo con Arduino, es extremadamente fácil comparado con el asm de los PIC. Si te das cuenta, ya no hay tanto como antes, una exageración, se paresaron a la moda de los ARduino y Raspberry Pi.
Este puede ayudar.
https://translate.google.com/
Te puedes ar una oportunidad a ti mismo con Arduino, es extremadamente fácil comparado con el asm de los PIC. Si te das cuenta, ya no hay tanto como antes, una exageración, se paresaron a la moda de los ARduino y Raspberry Pi.
Creo que voy a incursionar en arduino meta, tengo un lavarropas que está funcionando mal el programador, de acuerdo a los resultados que tengas compro , Siempre y cuando publiques el circuito y el programa. De todos modos esto está mal de entrada, es una opinión personal, puedo estar equivocado. Los motores universales o de escobillas para que funcionen correctamente deben funcionar con corriente continua, tienen mayor par de arranque, menor chispeo en las escobillas que cuando funciona en corriente alterna y lo más importante, tienen la capacidad de estabilizar las rpm con la tensión a pesar de la carga que tenga. Por ejemplo en el auto cuando subís o bajas los vidrios, cuando sube consume 10 amper y cuando baja 1 amper. No se si es tan así la relación pero aunque saques el motor afuera y lo conectes sin carga no se envuelta y no tiene tacometro. Yo pondría en paralelo el estator con las escobillas y la alimentaria con CC. 20 voltios para el lavado y 70 voltios para el centrifugado aproximadamente, por decir algo. Lo dejaría sin tacometro.
, Siempre y cuando publiques el circuito y el programa. De todos modos esto está mal de entrada, es una opinión personal, puedo estar equivocado. Los motores universales o de escobillas para que funcionen correctamente deben funcionar con corriente continua, tienen mayor par de arranque, menor chispeo en las escobillas que cuando funciona en corriente alterna y lo más importante, tienen la capacidad de estabilizar las rpm con la tensión a pesar de la carga que tenga. Por ejemplo en el auto cuando subís o bajas los vidrios, cuando sube consume 10 amper y cuando baja 1 amper. No se si es tan así la relación pero aunque saques el motor afuera y lo conectes sin carga no se envuelta y no tiene tacometro. Yo pondría en paralelo el estator con las escobillas y la alimentaria con CC. 20 voltios para el lavado y 70 voltios para el centrifugado aproximadamente, por decir algo. Lo dejaría sin tacometro.