Hice un circuito con un pic (16f628A) con el que manejo un equipo de radioaficionados (recibe y transmite )
tiene un encoder rotativo mecánico para cambiar las frecuencias pero éste se rompió y además no me gusta al tacto ya que al ser mecánico va parando en cada punto (los equipos de radio comerciales rotan sin parar)
En internet vi que mucha gente reemplaza el encoder mecánico desarmando un mouse viejo y usando el fototransistor y el emisor Led .
el problema es que no entiendo bien como conectarlo. El circuito tiene unos botones y unas resistencias pull up.....peeerrooo el rotary encoder parece que no lleva las resistencias pull up por lo cual me marea un poco.
}
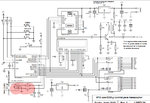
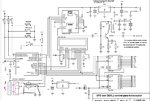
dejo una imagen donde pinto en rojo el encoder rotativo....
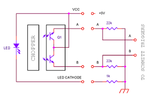
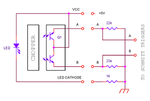
tambien dejo una imagen de un circuito optico de encoder hecho con un mouse..
puede ser que faltaría agregar dos transistores? se me ocurre que desde esa salida del circuito optico puedo poner dos bc548 pero tengo dudas de las conexiones, espero me puedan aclarar un poco ! gracias
tiene un encoder rotativo mecánico para cambiar las frecuencias pero éste se rompió y además no me gusta al tacto ya que al ser mecánico va parando en cada punto (los equipos de radio comerciales rotan sin parar)
En internet vi que mucha gente reemplaza el encoder mecánico desarmando un mouse viejo y usando el fototransistor y el emisor Led .
el problema es que no entiendo bien como conectarlo. El circuito tiene unos botones y unas resistencias pull up.....peeerrooo el rotary encoder parece que no lleva las resistencias pull up por lo cual me marea un poco.
}
dejo una imagen donde pinto en rojo el encoder rotativo....
tambien dejo una imagen de un circuito optico de encoder hecho con un mouse..
puede ser que faltaría agregar dos transistores? se me ocurre que desde esa salida del circuito optico puedo poner dos bc548 pero tengo dudas de las conexiones, espero me puedan aclarar un poco ! gracias