Funcionó muy bien, lo que ahora haré es implementar un corte por sobrecorriente tendré que hacer la medición clásica, o sea mediante una resistencia shunt enviar la medición adaptándola mediante operacionales para que el PIC pueda medirlo, además quiero que muestre el valor en una LCD, quiero también que realimente la velocidad pero no sé si eso se pueda hacer con el PIC para que corrija dependiendo de la carga la velocidad del motor midiendo el voltaje de armadura tendría alguien una idea????
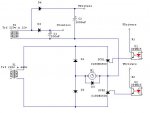
Tengo también una duda, el campo está alimentado con un rectificador de onda completa, no sé si eso sea correcto ya que no existe ningún filtrado y el voltaje es lógicamente pulsante, no sé en que afecte esto, me recomendarían colocar un filtro? de que tipo? mi idea es poner uno LC (inductancia en serie y capacitor en paralelo con la bobina del campo), para el caso del voltaje de armadura no creo poder colocar un filtro que soporte la corriente (me refiero a la bobina que hará de inductancia para el filtro LC que tendrá que soportar 109Amp).
En fin, agradezco cualquier idea o sugerencia....
Saludos y gracias