


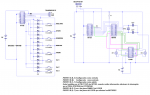
Hola, espero me puedan ayudar muchas gracias de antemano. Mi proyecto es un carro manejado a control remoto, con módulos RF, el codificador HT12E, decodificador HT12D, L293D y PIC16F84A. Me está funcionado usando 5 pulsadores en la parte transmisora que son para Adelante, Atrás, Derecha, Izquierda y Parar. Ahora deseo agregarle 3 pulsadores que son Vel1 (30% alto-70% bajo), Vel2 (60% alto-40% bajo) y Vel3 (100% alto-0% bajo). La idea es usar PWM e Interrupción. La interrupción será activada por PORTB,0 que recibirá la señal del pin 17 VT del Ht12D. PORTA (0..3) configurados como entrada PORTB (0) como entrada y PORTB (1..7) como salidas. En el cuerpo principal del programa Periodos actúa el PWM con VEL1 hasta que se active una interrupción, en la interrupción se leerá El PUERTO A y de acuerdo con la lectura se ejecutara ADELANTE, ATRÁS, DERECHA, IZQUIERDA, PARA, VEL1, VEL2 o VEL3. Inicialmente el programa inicia el carro parado, cuando se inicia la velocidad será Vel1, por lo cual uso la bandera Activo, es para controlar que si se presiona uno de los pulsadores de Vel1-2-3- y el carro está parado no me afecte las variables Alto y Bajo.
Mis dudas 1) cuando valida una señal recibida el HT12D por el pin 17 es una señal alta o baja la que afectara al pin PORTB,0 del PIC16F84A. 2) Tengo que presionar muchas veces un pulsador para que funcione y no siempre lo hace. Anexo mi progama
Muchas gracias
;---------------Encabezado-----------
__CONFIG _CP_OFF & _WDT_OFF & _PWRTE_ON & _XT_OSC
LIST P=16F84A
INCLUDE <P16F84A.INC>
;-------Configuración de puertos-------
cblock 0x0c
PDel0
PDel1
ContadorD
Activo
Alto
Bajo
DIRECCION
endc
ORG 0x00
GOTO Inicio
ORG 0X04 ; Atiendo la interrupción
GOTO Pulsadores
Inicio
BSF STATUS,5 ; configurando puertos
MOVLW B'00011111'
MOVWF TRISA
MOVLW B'00000001'
MOVWF TRISB ; puerto B es salida
MOVLW B'11000000'
MOVWF OPTION_REG
BCF STATUS,5
MOVLW b'10010000' ;Interrupcion por PORTB,0
MOVWF INTCON
CLRF PORTB ; limpiamos PORTB
CLRF PORTA
BCF Activo,0
Cargar
MOVLW d'3'
MOVWF Alto
MOVLW d'7'
MOVWF Bajo
CLRF DIRECCION
BCF Activo,0 ;Verifica si el carro esta parado
Periodo
MOVF Activo,W ; sale de este loop cuando se active con
SUBLW D'1' ; Adelante, Atras; Izquierda, Derecha
BTFSS STATUS,Z
GOTO Periodo
MOVF Bajo,W
SUBLW D'10'
BTFSS STATUS,Z
CALL Periodo_Alto
MOVF Alto,W
SUBLW D'10'
BTFSS STATUS,Z
CALL Periodo_Bajo
Goto Periodo
Periodo_Alto
MOVF DIRECCION,W
MOVWF PORTB
MOVF Alto,W
MOVWF ContadorD
CALL DEMORA1000X?
RETURN
Periodo_Bajo
MOVLW B'00000000'
MOVWF PORTB
MOVF Bajo,W
MOVWF ContadorD
CALL DEMORA1000X?
RETURN
DEMORA1000X?
MOVLW .74
MOVWF PDel0
MOVLW .2
MOVWF PDel1
LOOP
DECFSZ PDel0,F
GOTO LOOP
DECFSZ PDel1,F
GOTO LOOP
decfsz ContadorD ; decrementa cantidad de veces
goto DEMORA1000X?
Return
CBLOCK
Guarda_W
Guarda_STATUS
Guarda_ContadorD
ENDC
Pulsadores
movwf Guarda_W ; Guarda W y STATUS.
swapf STATUS,W ; Ya que "movf STATUS,W" corrompe el bit Z.
movwf Guarda_STATUS
bcf STATUS,RP0 ; Para asegurarsede que trabaja con el Banco 0.
movf ContadorD,W ; Guarda los registros utilizados en esta
movwf Guarda_ContadorD ; subrutina y también en la principal.
SUBLW D'20'
MOVWF ContadorD
CALL DEMORA1000X?
MOVF PORTA,W
XORLW 0x05 ; b'00000101' d'05'
BTFSC STATUS,Z
GOTO ADELANTE
MOVF PORTA,W
XORLW 0x0A ; b'00001010' d'10'
BTFSC STATUS,Z
GOTO ATRAS
MOVF PORTA,W
XORLW 0x06 ; b'00000110' d'06'
BTFSC STATUS,Z
GOTO DERECHA
MOVF PORTA,W
XORLW 0x09 ; b'00001001' d'09'
BTFSC STATUS,Z
GOTO IZQUIERDA
MOVF PORTA,W
XORLW 0x03 ; b'00000011' d'03'
BTFSC STATUS,Z
GOTO PARAR
MOVF PORTA,W
XORLW 0x02 ; b'00000010' d'02'
BTFSC STATUS,Z
GOTO Vel_1
MOVF PORTA,W
XORLW 0x0E ; b'00001110' d'14'
BTFSC STATUS,Z
GOTO Vel_2
MOVF PORTA,W
XORLW 0x07 ; b'00000111' d'07'
BTFSC STATUS,Z
GOTO Vel_3
GOTO FinInterrupcion
ADELANTE
BSF Activo,0
MOVLW b'10101100'
MOVWF DIRECCION
GOTO FinInterrupcion
ATRAS
BSF Activo,0
MOVLW b'01011100'
MOVWF DIRECCION
GOTO FinInterrupcion
DERECHA
BSF Activo,0
MOVLW b'10011100'
MOVWF DIRECCION
GOTO FinInterrupcion
IZQUIERDA
BSF Activo,0
MOVLW b'01101100'
MOVWF DIRECCION
GOTO FinInterrupcion
PARAR
MOVLW d'3'
MOVWF Alto
MOVLW d'7'
BCF Activo,0
MOVLW b'00000000'
MOVWF DIRECCION
GOTO FinInterrupcion
Vel_1
MOVF Activo,W ; Si esta en movimiento puedo
SUBLW D'0' ; afectar la velocidad
BTFSC STATUS,Z
GOTO FinInterrupcion
MOVLW d'3'
MOVWF Alto
MOVLW d'7'
MOVWF Bajo
GOTO FinInterrupcion
Vel_2
MOVF Activo,W ; Si esta en movimiento puedo
SUBLW D'0' ; afectar la velocidad
BTFSC STATUS,Z
GOTO FinInterrupcion
MOVLW d'6'
MOVWF Alto
MOVLW d'4'
MOVWF Bajo
GOTO FinInterrupcion
Vel_3
MOVF Activo,W ; Si esta en movimiento puedo
SUBLW D'0' ; afectar la velocidad
BTFSC STATUS,Z
GOTO FinInterrupcion
MOVLW d'10'
MOVWF Alto
MOVLW d'0'
MOVWF Bajo
GOTO FinInterrupcion
FinInterrupcion
movf Guarda_ContadorD,W ; Restaura los registros utilizados en esta
movwf ContadorD ; subrutina y también en la principal.
swapf Guarda_STATUS,W ; Restaura el STATUS.
movwf STATUS
swapf Guarda_W,F ; Restaura W como estaba antes de producirse
swapf Guarda_W,W ; interrupción.
Bcf INTCON,INTF
retfie
;==========================================================================
END
;==========================================================================
Mis dudas 1) cuando valida una señal recibida el HT12D por el pin 17 es una señal alta o baja la que afectara al pin PORTB,0 del PIC16F84A. 2) Tengo que presionar muchas veces un pulsador para que funcione y no siempre lo hace. Anexo mi progama
Muchas gracias
;---------------Encabezado-----------
__CONFIG _CP_OFF & _WDT_OFF & _PWRTE_ON & _XT_OSC
LIST P=16F84A
INCLUDE <P16F84A.INC>
;-------Configuración de puertos-------
cblock 0x0c
PDel0
PDel1
ContadorD
Activo
Alto
Bajo
DIRECCION
endc
ORG 0x00
GOTO Inicio
ORG 0X04 ; Atiendo la interrupción
GOTO Pulsadores
Inicio
BSF STATUS,5 ; configurando puertos
MOVLW B'00011111'
MOVWF TRISA
MOVLW B'00000001'
MOVWF TRISB ; puerto B es salida
MOVLW B'11000000'
MOVWF OPTION_REG
BCF STATUS,5
MOVLW b'10010000' ;Interrupcion por PORTB,0
MOVWF INTCON
CLRF PORTB ; limpiamos PORTB
CLRF PORTA
BCF Activo,0
Cargar
MOVLW d'3'
MOVWF Alto
MOVLW d'7'
MOVWF Bajo
CLRF DIRECCION
BCF Activo,0 ;Verifica si el carro esta parado
Periodo
MOVF Activo,W ; sale de este loop cuando se active con
SUBLW D'1' ; Adelante, Atras; Izquierda, Derecha
BTFSS STATUS,Z
GOTO Periodo
MOVF Bajo,W
SUBLW D'10'
BTFSS STATUS,Z
CALL Periodo_Alto
MOVF Alto,W
SUBLW D'10'
BTFSS STATUS,Z
CALL Periodo_Bajo
Goto Periodo
Periodo_Alto
MOVF DIRECCION,W
MOVWF PORTB
MOVF Alto,W
MOVWF ContadorD
CALL DEMORA1000X?
RETURN
Periodo_Bajo
MOVLW B'00000000'
MOVWF PORTB
MOVF Bajo,W
MOVWF ContadorD
CALL DEMORA1000X?
RETURN
DEMORA1000X?
MOVLW .74
MOVWF PDel0
MOVLW .2
MOVWF PDel1
LOOP
DECFSZ PDel0,F
GOTO LOOP
DECFSZ PDel1,F
GOTO LOOP
decfsz ContadorD ; decrementa cantidad de veces
goto DEMORA1000X?
Return
CBLOCK
Guarda_W
Guarda_STATUS
Guarda_ContadorD
ENDC
Pulsadores
movwf Guarda_W ; Guarda W y STATUS.
swapf STATUS,W ; Ya que "movf STATUS,W" corrompe el bit Z.
movwf Guarda_STATUS
bcf STATUS,RP0 ; Para asegurarsede que trabaja con el Banco 0.
movf ContadorD,W ; Guarda los registros utilizados en esta
movwf Guarda_ContadorD ; subrutina y también en la principal.
SUBLW D'20'
MOVWF ContadorD
CALL DEMORA1000X?
MOVF PORTA,W
XORLW 0x05 ; b'00000101' d'05'
BTFSC STATUS,Z
GOTO ADELANTE
MOVF PORTA,W
XORLW 0x0A ; b'00001010' d'10'
BTFSC STATUS,Z
GOTO ATRAS
MOVF PORTA,W
XORLW 0x06 ; b'00000110' d'06'
BTFSC STATUS,Z
GOTO DERECHA
MOVF PORTA,W
XORLW 0x09 ; b'00001001' d'09'
BTFSC STATUS,Z
GOTO IZQUIERDA
MOVF PORTA,W
XORLW 0x03 ; b'00000011' d'03'
BTFSC STATUS,Z
GOTO PARAR
MOVF PORTA,W
XORLW 0x02 ; b'00000010' d'02'
BTFSC STATUS,Z
GOTO Vel_1
MOVF PORTA,W
XORLW 0x0E ; b'00001110' d'14'
BTFSC STATUS,Z
GOTO Vel_2
MOVF PORTA,W
XORLW 0x07 ; b'00000111' d'07'
BTFSC STATUS,Z
GOTO Vel_3
GOTO FinInterrupcion
ADELANTE
BSF Activo,0
MOVLW b'10101100'
MOVWF DIRECCION
GOTO FinInterrupcion
ATRAS
BSF Activo,0
MOVLW b'01011100'
MOVWF DIRECCION
GOTO FinInterrupcion
DERECHA
BSF Activo,0
MOVLW b'10011100'
MOVWF DIRECCION
GOTO FinInterrupcion
IZQUIERDA
BSF Activo,0
MOVLW b'01101100'
MOVWF DIRECCION
GOTO FinInterrupcion
PARAR
MOVLW d'3'
MOVWF Alto
MOVLW d'7'
BCF Activo,0
MOVLW b'00000000'
MOVWF DIRECCION
GOTO FinInterrupcion
Vel_1
MOVF Activo,W ; Si esta en movimiento puedo
SUBLW D'0' ; afectar la velocidad
BTFSC STATUS,Z
GOTO FinInterrupcion
MOVLW d'3'
MOVWF Alto
MOVLW d'7'
MOVWF Bajo
GOTO FinInterrupcion
Vel_2
MOVF Activo,W ; Si esta en movimiento puedo
SUBLW D'0' ; afectar la velocidad
BTFSC STATUS,Z
GOTO FinInterrupcion
MOVLW d'6'
MOVWF Alto
MOVLW d'4'
MOVWF Bajo
GOTO FinInterrupcion
Vel_3
MOVF Activo,W ; Si esta en movimiento puedo
SUBLW D'0' ; afectar la velocidad
BTFSC STATUS,Z
GOTO FinInterrupcion
MOVLW d'10'
MOVWF Alto
MOVLW d'0'
MOVWF Bajo
GOTO FinInterrupcion
FinInterrupcion
movf Guarda_ContadorD,W ; Restaura los registros utilizados en esta
movwf ContadorD ; subrutina y también en la principal.
swapf Guarda_STATUS,W ; Restaura el STATUS.
movwf STATUS
swapf Guarda_W,F ; Restaura W como estaba antes de producirse
swapf Guarda_W,W ; interrupción.
Bcf INTCON,INTF
retfie
;==========================================================================
END
;==========================================================================
Adjuntos
Última edición: