Que tal amigos...soy un poco nuevo en esto de la robótica y me gustaria que me ayudaran con una pequeña duda que me surgio.......
me dieron ganas de hacerme un robot que evite obstaculos pero con componentes sencillos y sin necesidad de recurrir a un micro.
la cosa es esta.......
el robot tiene que avanzar en linea recta, si uno de sus bumpers toca un obstaculo el robot tiene que retroceder un poco y luego girar al sentido contrario del lado que senso y seguir su camino....
la pregunta seria, ¿es posible hacer esto con componentes basicos?....si si como
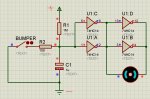
nota: yo estuve buscando informacion y me encontre con el CI 74HC14 y vi que en algunos casos lo ocupan como puente h, es posible hacer lo que quiero con ese CI? como le doy la secuencia para que retroceda y gire.....puedo usar un 555 para hacer el retardo ?
los motores son de 3v (de juguete)
espero me puedan despejar la duda gracias
me dieron ganas de hacerme un robot que evite obstaculos pero con componentes sencillos y sin necesidad de recurrir a un micro.
la cosa es esta.......
el robot tiene que avanzar en linea recta, si uno de sus bumpers toca un obstaculo el robot tiene que retroceder un poco y luego girar al sentido contrario del lado que senso y seguir su camino....
la pregunta seria, ¿es posible hacer esto con componentes basicos?....si si como
nota: yo estuve buscando informacion y me encontre con el CI 74HC14 y vi que en algunos casos lo ocupan como puente h, es posible hacer lo que quiero con ese CI? como le doy la secuencia para que retroceda y gire.....puedo usar un 555 para hacer el retardo ?
los motores son de 3v (de juguete)
espero me puedan despejar la duda gracias