Estimadísimos,
estoy trabajando en un seguidor solar (solar tracker) que está a medio armar. Falta el "cerebro" electrónico. O sea, la parte de electrónica de potencia para mover los motores del tracker está hecha.
Ok, hay montones de esos en internet, pero ninguno que cumpla con lo siguiente: a ver si me entienden la secuencia de los hechos:
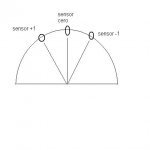
Este tracker sigue el sol, cuando HAY sol a través de sus sensores de luz. Pero cuando no hay, porque hay nubes, este tracker igual debe seguir el sol. Por lo tanto, debo meter dentro del PIC una función matemática que describa la trayectoria del sol en el cielo por todo un año, y el tracker se debe mover según esa función. Existe.
Para esto existen dos formas de incluír esto en el programa dentro de un uC o PIC:
1) Calcular posición según Lat, Long, fecha, tiempo, etc, lo cual me obliga a agregar librerías matemáticas al programa, que puede que ocupen demasiada memoria.
2) Utilizar una tabla con los resultados calculados que esté dentro de una memoria externa. Estas tablas también existen, y existen de esas que con pocos datos y cálculos de interpolación simples tienen un error porcentual de ... poquísimo, lo cual me serviría.
Ahora la pregunta:
Alguien conoce una de estas tablas o sabe como se llama? No tengo idea como buscar una de estas en internet. Existen al alcance de todos. Solo necesito una guía de como llegar a ellas.
Les agradezco mucho!
Eliusm
estoy trabajando en un seguidor solar (solar tracker) que está a medio armar. Falta el "cerebro" electrónico. O sea, la parte de electrónica de potencia para mover los motores del tracker está hecha.
Ok, hay montones de esos en internet, pero ninguno que cumpla con lo siguiente: a ver si me entienden la secuencia de los hechos:
Este tracker sigue el sol, cuando HAY sol a través de sus sensores de luz. Pero cuando no hay, porque hay nubes, este tracker igual debe seguir el sol. Por lo tanto, debo meter dentro del PIC una función matemática que describa la trayectoria del sol en el cielo por todo un año, y el tracker se debe mover según esa función. Existe.
Para esto existen dos formas de incluír esto en el programa dentro de un uC o PIC:
1) Calcular posición según Lat, Long, fecha, tiempo, etc, lo cual me obliga a agregar librerías matemáticas al programa, que puede que ocupen demasiada memoria.
2) Utilizar una tabla con los resultados calculados que esté dentro de una memoria externa. Estas tablas también existen, y existen de esas que con pocos datos y cálculos de interpolación simples tienen un error porcentual de ... poquísimo, lo cual me serviría.
Ahora la pregunta:
Alguien conoce una de estas tablas o sabe como se llama? No tengo idea como buscar una de estas en internet. Existen al alcance de todos. Solo necesito una guía de como llegar a ellas.
Les agradezco mucho!
Eliusm