Follow along with the video below to see how to install our site as a web app on your home screen.

Nota: This feature currently requires accessing the site using the built-in Safari browser.
#include <16f628A.h>
#fuses INTRC, NOWDT, NOPUT, NOMCLR, NOBROWNOUT, NOLVP, NOCPD, NOPROTECT
#use delay(clock=4000000)
#include <lcd_b.c>
int time0, time1;
int16 pulses0, pulses, rpm, time;
int1 rpmbit;
void rpm_get()
{
rpm=60*pulses;
if(pulses0!=pulses)
{
printf(lcd_putc,"\fRpm \n%Lu", rpm);
delay_ms(1500);
}
pulses=0;
time1=0;
}
void main()
{
set_tris_a(0x1F);
rpm=0;
time=0;
time0=0;
time1=time0;
pulses=0;
pulses0=pulses;
rpmbit=1;
lcd_init();
lcd_putc("\fBienvenido\n");
output_low(PIN_A7);
do
{
diagnostico();
if(input(PIN_A1))
{
if((input(PIN_A0))&&(rpmbit==1))
{
pulses++;
rpmbit=0;
}
if((!input(PIN_A0))&&(rpmbit==0))
{
rpmbit=1;
}
time0++;
if(time0>=250)
{
time1++;
time0=0;
if(time1>=4)
{
time0=0;
if(pulses<1)
{
lcd_putc("\frpm < 60\nO sin giro");
delay_ms(500);
}
else
{
rpm_get();
pulses0=pulses;
}
}
}
}
if(input(PIN_A2))
{
output_toggle(PIN_A7);
if(!input(PIN_A1))
{
lcd_putc("\fMotor Apagado");
}
delay_ms(500);
}
delay_ms(1);
}
while(1);
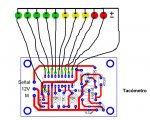
}Hola, estaba viendo la problematica y aqui les traigo un tacometro con PIC, se trata de un optoacoplador que cuenta las veces que la luz es interrumpida de acuerdo a eso calcula las RPM y el motor es activado con un switch(vease diagrama adjunto), espero y sea de ayuda.
Saludos
Desde mas arriba desde 60 RPM, pero bueno vamos a darle una solucion.
Saludos
Que buena onda, mi padre tambien es tornero, por cierto ya encontre la manera de ampliar el rango, el unico incoveniente es que para medir RPM menores a 20 tarda mas en actualizar el resultado, en este caso tarda 8 segundos, el valor minimo es de 15 rpm, en el caso anterior por ejemplo tardaba menos en actualizar por que solo tomaba muestras en un segundo es por eso que se dificultaba medir RPM menores a 60, es este ultimo toma muestras en 8 segundos, no es ninguna molestia, para eso estamos, por cierto el PIC para este caso es el 16F877, espero y sea de ayuda.
Saludos