Hola amigos, quiero compartir con Ustedes la felicidad que siento por haber finalmente encontrado un camino que con los conocimientos adquiridos en el último un poco mas de un año me abre la ruta para empezar a modelar mi sistema de escotas según la metodología del diseño por modelación. Claro que ese proceso de empezar a modelar implica un montón de estudios, de aprendizajes y de experimentación! Estoy absolutamente seguro que eso me ocupará para lo que queda de este año que acaba de empezar!
Quiero indicar que dentro del concepto de mi sistema de control de escotas me limitaré a tratar un aspecto aislado y que creo que es lo suficientemente sencillo para en aplicar la metodología poder aprender su uso y las herramientas de que consiste! El reto al que me estoy enfrentando ahora es ver como puedo presentarles lo que quiero narrar y que su nexo con nuestra afición, el modelismo naval sea evidente!
Me voy a limitar a modelar el aparejo que aparece en esta foto del velero original, la Endeavour!
El objetivo de esta modelación es poder determinar en las simulaciones a que velocidad del viento soplando a la vela, considerando que el viento puede soplar desde perpendicular a la vela, 90°, o paralelo a la vela, 0°, la fuerza que la escota conectada al palo de la vela mayor es capaz de tener el mismo valor que la suma de las fricciones entre la escota y los 7 discos del aparejo! Cualquier viento mas fuerte, mas rápido, será capaz de abrir la vela!
Este objetivo resulta a razón de indicaciones muy respetadas y bien venidas de expertos modelistas navales en cosa de veleros, que la fricción de la escota en el aparejo es tal que la vela deja de ser capaz de abrirse a raz´n de la presión del viento en la vela!
Estoy muy conciente, que fuera de la fricción entre la escota y los 7 discos del aparejo existen mas factores que impactan la capacidad de la vela de poder abrirse y así teniendo que "tirar" de la escota! Pero mi ejercicio de modelar solo y exclusivamente el comportamiento entre la escota y su movimiento por los discos del aparejo y esto con el palo de la vela en cualquier ángulo entre perpendicular al eje central del casco, 90° y alineado con el eje central del casco, 0°!
La razón por dedicarme a modelar esta parte de mi sistema de control de escotas en un primer paso es por ser el sistema relativamente sencillo y limitado a la interacción entre la escota y los 7 discos del aparejo! Sin embargo aún este aspecto sencillo tiene un número muy grande de aspectos que si son entendidos a fondo permiten diseñar el aparejo de tal forma que la fricción sea mínima.
He encontrado en el Internet las thesis de ingenieros y físicos que describen y analizan la fricción entre una escota y un disco o cilindro y así aprendí que el primer trabajo en relación a la disminución de la fuerza requerida para bajar un barril, supongamos de vino o cerveza al sótano, usando una cuerda que en varias vueltas recorre la circunferencia de tal barril:
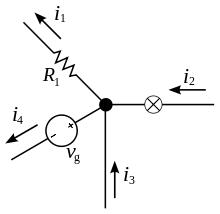
Siendo modelistas navales todos conocen el efecto que por ejemplo aparece en la foto central. Puede ser un buque de tenedores gigantesco, si la cuerda es lo suficientemente fuerte y le doy suficientes vueltas a la bita de amarre la fricción e la cuerda será suficiente para resistir la tensión del buque!
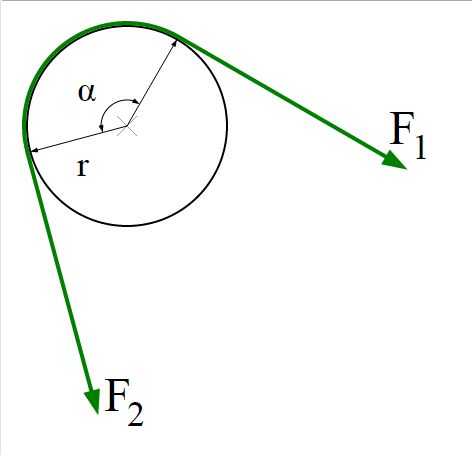
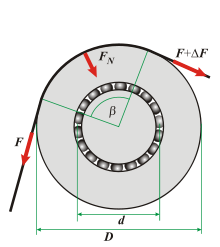
Esta gráfica resalta la Fuerza F1 que por ejemplo sería aquella fuerza que resulta por el tirar de la escota cuando el palo quiere abrirse mas! Además vemos, lo que es relevante, el ángulo
α que es la medida para el sector del disco que está en contacto can la escota. En la foto del aparejo de la Endeavour vemos que en muchos de los discos el valor de
α difiere y que por lo tanto la fricción en tal disco también tendrá otro valor. Lo que en un primer paso dejaré sin considerar es si cuando el palo oscila entre 0° y 90° el ángulo
α de las escotas en los discos puede cambiar. Experimentos determinarán el impacto junto con el análisis de los datos simulados.
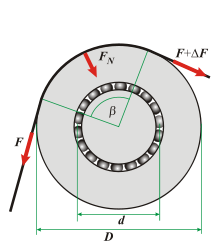
Este gráfico ya entra en mas detalle y los siguientes 4 renglones con sendas fórmulas describen de forma matemática el como se calculan las fuerzas. es importante para entender las próximas ecuaciones, y por favor no se dejen intimidar, realmente no es difícil!
la fuerza "F" dibujada en color rojo es aquella fuerza que tiempla la escota o por decirlo de otra forma, es la fuerza de tiro del palo de la vela mayor de la escota! Si seguimos la línea negra gruesa, vemos donde la escota abandona el contacto con el disco la suma de las fuerzas F y ΔF. Vemos si asumimos que las fuerzas a ambos lados del disco son iguales, resulta:
F = F + ΔF
ΔF sería la fuerza de la fricción. La fuerza de tiro del palo de la vela mayor F pierde la fuerza ΔF por la fricción que ocurre en el primer disco! así cuando la escota llega al segundo disco se repite lo que muestra el gráfico, solo que ahora la fuerza F a la izquierda es menor a la fuerza F de tiro antes del primer disco a razón de la pérdida de fricción en el primer disco. Esto se repite del primer al séptimo disco. Si en el séptimo disco suponemos que la fuerza F a la derecha es F = 0 Entonces podemos decir que:
F = ΔF1 + ΔF2 + ΔF3 + ΔF4 + ΔF5 + ΔF6 + ΔF7
Siendo los números del 1 al 7 los índices representando los 7 discos del aparejo. Si esta ecuación es correcta, entonces existe un equilibrio entre la fuerza de tiro por el palo de la vela mayor de la escota y las fricciones de la escota en esos 7 discos. La vela mantendrá en tal caso su posición, pues no es capaz de contrarrestar las fricciones entre la escota y los 7 discos.
Cada uno de los 7 ΔF se calcula para cada disco.
En esta ecuación vemos como se relacionan la fuerza de tensión de la escota al llegar al próximo disco a razón del tiro del palo de la vela mayor y la fuerza FN que vemos en el gráfico anterior a las ecuaciones y que va de forma perpendicular hacia el centro del disco! La fuerza de fricción resulta de esta fuerza FN y vemos que la fuerza FN es proporcional al ángulo en el cual la escota está en contacto con el disco!
ΔF1 = 0.01 F. Un factor que por aproximación se define así y que resulta de la construcción de la escota y de su tensión. Como vemos solo impacta por un 1%, pero la hace en cada disco, aquí 7 veces!
ΔF2 es la ecuación que representa la aportación de la fricción del eje alrededor del cual gira el disco! µ siendo el coeficiente de fricción.
así pues esta ecuación nos da la suma del aporte de la pérdida de fuerza de tiro de la escota al pasar por cada uno de los 7 discos del aparejo!
Presenté esto en detalle para demostrar que el modelar de un sistema tienes que considerar un alto número de factores que influencian su comportamiento! No presenté en detalle como, partiendo de un viento definido en metros por segundo {m/s] en la vela mayor de mi velero con la geometría de la vela resulta la fuerza que busca abrir el ángulo entre el palo de la vela mayor y el eje central del casco.
Tampoco presenté que si conozco tal tuerza como esta entra al aparejo, cuando 2 de los bloques van colgados de sendas cuerda del palo de la vela mayor y un bloque va colgando mas atrás directamente del palo de la vela mayor! Todo lo que resulta hacer es reflejar la ecuación que computa la fuerza del palo sobre donde el bloque va conectado al palo de la vela mayor. El modelo y su simulación se encargaran de computar las contribuciones en los 3 bloques conectados al palo de la vela mayor.
Tampoco he analizado aún como el ángulo
α cambia para cada bloque dependiendo del ángulo entre el casco y el palo de la vela mayor.
Pero creo que he logrado demostrar que en un modelo numerosos factores influyen y que tales factores están en cierta relación entre sí y con el palo de la vela y el casco. La posibilidad de lograr aplicar una técnica que me permite de forma clara y con asistencia de la herramienta para de forma incremental ir sumando factores y relacionar estos representaba un reto al que le tenía pavor!
Pues resulta que la herramienta "Berkeley Madonna" logra exactamente esto! De forma visual y con su asistencia se van sumando los factores que se quieren considerar y la herramienta Berkeley Madonna va indicando si todas las dependencias han sido implementadas de forma completa. Aún estoy aprendiendo a usar la herramienta "Microsoft Expressión 4.0" que está disponible en el sitio de Microsoft de forma gratuita permite no solo crear imágenes de lo que aparece en la pantalla o en una webcam como foto de la pantalla, sinó que también permite grabar en un video mientras se está haciendo algo en la pantalla del PC y sumarle la voz a ello. Apenas tenga resultados tolerables los presentaré aquí, pues esa herramienta "Berkeley Madonna" es una maravilla y a diferencia de herramientas similares los gráficos son muy lindos de ver, lo que apoya en el proceso de entender lo que se ve!
Acabo de mencionar que el problema de ir sumando los factores que influencian el comportamiento de un modelo gracias a aquella herramienta es facil de controlar. hay que mencionar que la metodología que la herramienta "Berkeley Madonna" hace disponible es una que se aplica desde hace muchos años para modelar sistemas dinámicos"! Lo que lamento mucho es que cuando peritos latinoamericanos presentan la materia lo hacen de forma sumamente falto de transparencia e ignorando el uso y la existencia de modernas herramientas.
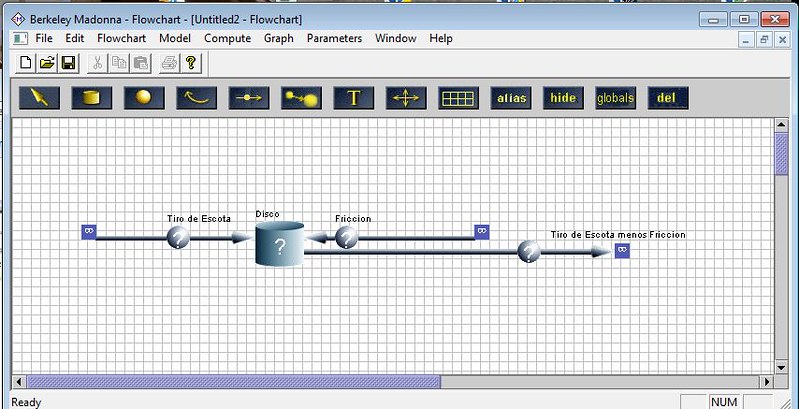
Permítanme presentar una imagen del ejemplo de un "Flow Chart" que empecé haciendo con la herramienta "Berkeley Madonna" y permítanme también confesar que las denominaciones de los elementos para describir un disco del aparejo también contienen un error importante!
El error sin embargo no es relevante para mostrar la estructura básica que usa "Berkeley Madonna", la estructura básica usada en la ciencia de "sistemas dinámicos y en lo que el profesor Werner Maurer de la universidad suiza de Winterthur llama "System Physics" y que me he permitido en traducir como "Física de Sistemas"!
En todos estos campos se describe, modela un sistema dinámico partiendo de mínimo un depósito, aquí erróneamente lo he llamado "Entropía". la fuerza F si la conocen y la presente antes. La fricción es equivalente a ΔF en el texto arriba!
Como escribía se puede tomar la equivalencia a recipientes de agua. La fuerza "F" representa una magnitud de flujo que transporta contenido el recipiente hacia afuera, salida, desagüe! En nuestro caso del disco del aparejo es la fuerza con la que la vela tira de la escota! La fricción en el gráfico sería un desagüe también lo que definitivamente pudiera ser un error!
La razón por esa incertidumbre la repito aquí, pues refleja el reto al que estoy expuesto, pero el que creo saber donde poder aprender el corregirlo!
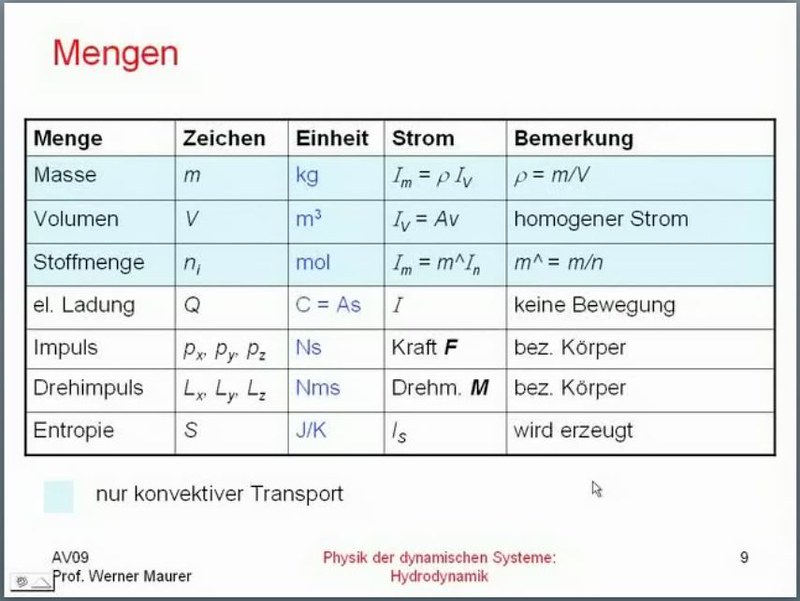
En la tabla aparecen esas magnitudes de la física a los cuales en la Física de Sistemas se limita lo que puede estar en un recipiente! Como está en alemán voy a traducir la primera y la última columna e indicar lo que significan otros datos en esta tabla!
Masse = Masa el símbolo es "m", la unidad son kg, la magnitud de flujo asociada es ...
Volumen = volumen, flujo homógeno
Stoffmenge = no encuentro la traducción, se trata de un término químico como lo indican las unidades correspondientes.
El flujo de estas magnitudes es un movimiento físico y aparecen con fondo azul claro!
el. Ladung = Carga Eléctrica, no ocurre movimiento físico por lo general!
Impuls = Impulso
Drehimpuls = Impulso rotativo
Entropie = entropía es generada
Se trata de magnitudes físicas de la física de sistemas dinámicos y aparece en una hoja dentro de sus lecturas sobre hidrodinámica.
Viendo estas 7 magnitudes que pueden ser contabilizadas en el recipiente del "Flow Chart" de Berkeley Madonna y tratando de ver cual podría ser factible para el caso de la modelación del aparejo de mis sistema de control de escotas la única opción que me parece adecuada es aquella en el quinto renglón de la tabla.
Lo que tengo que acabar de comprender bien y así poder aplicar correctamente es aquello del recipiente y los flujos y aplicarlo a lo que se denomina como mechanica translatórica.



 .
.