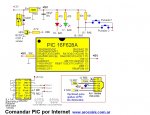
soy algo inexperto en este tema pero la idea es que usando un pic 16f84a un max 232 un puente h tipo l293d se haga funcionar dos motores tomando como base la conexion atraves del puerto lan y este tenga autonegociacion para determinar la direccion ip de esta forma se pueda acceder remotamente y controlar el sentido de giro de dos motores a 12v  , en pablin encontre el servidor para que funcione como hyperterminal parte del codigo .
, en pablin encontre el servidor para que funcione como hyperterminal parte del codigo .
pero el asunto es la tarjeta de lan usa 4 pares de conexion y el max puede recibir 2 pares
¿alguien que me pueda orientar en que pasos debo tener en cuenta??
, en pablin encontre el servidor para que funcione como hyperterminal parte del codigo .pero el asunto es la tarjeta de lan usa 4 pares de conexion y el max puede recibir 2 pares
¿alguien que me pueda orientar en que pasos debo tener en cuenta??