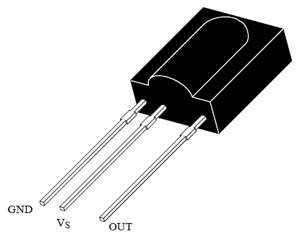
Este proyecto se trata de un decodificador de control remoto IR para los protocolos RC5 de Philips y el de SONY.
El sistema puede controlar 8 canales y también cuenta con un canal para generación de PWM a 1KHz.
Para utilizar un control remoto Philips, se usan los comandos numéricos del 1 al 8 para el control de los canales.
Para el control del ciclo activo del PWM se usa la tecla CH+ y la tecla CH-
Vol+ activa todos los canales y Vol- los desactiva.
Y para utilizar un control remoto Sony, se usan los comandos numéricos del 2 al 9 para el control de los canales.
Para el control del ciclo activo del PWM se usa la tecla Vol+ y la tecla Vol-
CH+ activa todos los canales y CH- los desactiva.
Para el control de los canales, al presionar por ejemplo la tecla 1, se activa el canal 1 y al presionar nuevamente la tecla el canal se desactiva, igualmente para los otros canales.
El sistema detecta todos los comandos válidos de los protocolos.
Cuando se detecta un comando fuera de los de control, se hace destellar un LED.
También incluí una salida serial RS-232 para obtener el valor de los comandos @ 9600bps.
Esta salida es únicamente para depuración del sistema y puede quedar sin conexión.
Por esta salida se envía unicamente el valor de los comandos fuera de los de control.
Notas:
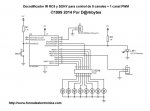
Para la etapa de potencia se pueden usar transistores, SCR's, triacs, relevadores, etc.
En el esquema se muestran unicamente los LED's de monitoreo de los canales.
Para la etapa de potencia del control PWM se puede usar un transistor NPN o un Mosfet canal N.
Con esta etapa se puede controlar la velocidad de un motor DC, algún LED o lampara.
Se debe usar en configuración de Emisor/Fuente (Source) común.
Adjunto los archivos *.hex, el código fuente en Basic de Proton IDE y el diagrama esquemático.
Espero que este proyecto sea de su agrado y utilidad.
Saludos y suerte.
El sistema puede controlar 8 canales y también cuenta con un canal para generación de PWM a 1KHz.
Para utilizar un control remoto Philips, se usan los comandos numéricos del 1 al 8 para el control de los canales.
Para el control del ciclo activo del PWM se usa la tecla CH+ y la tecla CH-
Vol+ activa todos los canales y Vol- los desactiva.
Y para utilizar un control remoto Sony, se usan los comandos numéricos del 2 al 9 para el control de los canales.
Para el control del ciclo activo del PWM se usa la tecla Vol+ y la tecla Vol-
CH+ activa todos los canales y CH- los desactiva.
Para el control de los canales, al presionar por ejemplo la tecla 1, se activa el canal 1 y al presionar nuevamente la tecla el canal se desactiva, igualmente para los otros canales.
El sistema detecta todos los comandos válidos de los protocolos.
Cuando se detecta un comando fuera de los de control, se hace destellar un LED.
También incluí una salida serial RS-232 para obtener el valor de los comandos @ 9600bps.
Esta salida es únicamente para depuración del sistema y puede quedar sin conexión.
Por esta salida se envía unicamente el valor de los comandos fuera de los de control.
Notas:
Para la etapa de potencia se pueden usar transistores, SCR's, triacs, relevadores, etc.
En el esquema se muestran unicamente los LED's de monitoreo de los canales.
Para la etapa de potencia del control PWM se puede usar un transistor NPN o un Mosfet canal N.
Con esta etapa se puede controlar la velocidad de un motor DC, algún LED o lampara.
Se debe usar en configuración de Emisor/Fuente (Source) común.
Adjunto los archivos *.hex, el código fuente en Basic de Proton IDE y el diagrama esquemático.
Espero que este proyecto sea de su agrado y utilidad.
Saludos y suerte.
") .
.