


Buenas.. despues de buscar y buscar no encuentro la forma de armar uno nuevo o modificar el circuito con el IC L293, L297 o L298 para el control de corriente o chopping de mis motores paso a paso unipolares..
El control de los mismos lo hago con una fuente serie enclavada en 8V que es la tension de los motores y el consumo no supera los 0,70A por fase, pero pasa que pierden mucho torque, o sea no tienen fuerza y lo que mas me tiene preocupado es que calientan demasiado cuando quedan enclabados o sea las bobinas pegadas para bloquearce mientras el otro eje se mueve..
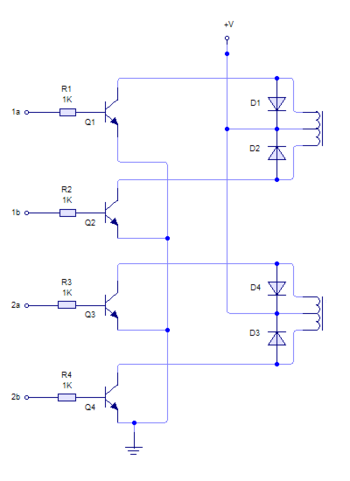
La parte de las ordenes la hago mediante un soft programado por mi hno en VB y funciona a la perfeccion.. El soft lee coordenadas Z, X e Y y les envia pulsos de corriente (5= encendido, 0= apagado) por los pines de salida del puerto LPT (paralelo) que luego cortocircuito a masa mediante un tr (TIP142) cada bobina del motor respetando la secuencia por supuesto... algo igual a esta imagen de abajo, una interfaz para cada motor...
Habria alguna forma de modificar el circuito ya que es muy simple lo que yo hago para mover los motores..... o intercalar o simplemente sensar la corriente que requieren los motores como para aplicar el PWM o chopping.... como lo hacen en los circuitos que aparecen en internet?
Necesitaria que me den una opinion...
Muchas Gracias
Saludos
Leandro
El control de los mismos lo hago con una fuente serie enclavada en 8V que es la tension de los motores y el consumo no supera los 0,70A por fase, pero pasa que pierden mucho torque, o sea no tienen fuerza y lo que mas me tiene preocupado es que calientan demasiado cuando quedan enclabados o sea las bobinas pegadas para bloquearce mientras el otro eje se mueve..
La parte de las ordenes la hago mediante un soft programado por mi hno en VB y funciona a la perfeccion.. El soft lee coordenadas Z, X e Y y les envia pulsos de corriente (5= encendido, 0= apagado) por los pines de salida del puerto LPT (paralelo) que luego cortocircuito a masa mediante un tr (TIP142) cada bobina del motor respetando la secuencia por supuesto... algo igual a esta imagen de abajo, una interfaz para cada motor...
Habria alguna forma de modificar el circuito ya que es muy simple lo que yo hago para mover los motores..... o intercalar o simplemente sensar la corriente que requieren los motores como para aplicar el PWM o chopping.... como lo hacen en los circuitos que aparecen en internet?
Necesitaria que me den una opinion...
Muchas Gracias
Saludos
Leandro
