hola atodos, necesuto si alguien tiene el diagrama de conexion de un servo con dos 555 uno en modo astable y el segundo en monoestable si alguien lo tiene o sabe como se conecta les agradecerian que lo subieran al foro. gracias


Follow along with the video below to see how to install our site as a web app on your home screen.

Nota: This feature currently requires accessing the site using the built-in Safari browser.
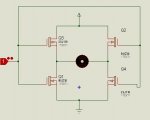
") , para empezar haz algo mucho mas sencillo, simplemente 4 mosfet (dos de canal n y 2 de canal p) y como lo unico que quieres es trabajar en corte o en saturacion, tan solo mandale la señal del pic directamente a dos mosfet y asi ya debe saturar, yo tengo una simulacion hecha con dos puentes H pero para controlar un motor paso a paso, el puente que hice estaba hecho con bjt. en la imagen te pongo un puente en H que he hecho con 4 mosfet muy sencillo y cuando le das un 1 va a un sentido y un 0 va al otro sentido. haz uno similar y me cuentas,
, para empezar haz algo mucho mas sencillo, simplemente 4 mosfet (dos de canal n y 2 de canal p) y como lo unico que quieres es trabajar en corte o en saturacion, tan solo mandale la señal del pic directamente a dos mosfet y asi ya debe saturar, yo tengo una simulacion hecha con dos puentes H pero para controlar un motor paso a paso, el puente que hice estaba hecho con bjt. en la imagen te pongo un puente en H que he hecho con 4 mosfet muy sencillo y cuando le das un 1 va a un sentido y un 0 va al otro sentido. haz uno similar y me cuentas,