Mil gracias por las respuestas. Ya estoy pidiendo a mi hija que vaja a la tienda a recoger el cable para el USB.
Para el otro conector uso un cable plano de 8 hilos con una fila de pines macho en ambos cabos que haga yo mismo. Ese cable lo haré cuando sepa exactamente cual es la longitud mínima puedo usar de forma adecuada. Ese cable plano conecta el "Link USB-JTAG con la placa LPCXpresso1769 de la que separe la placa "Link".
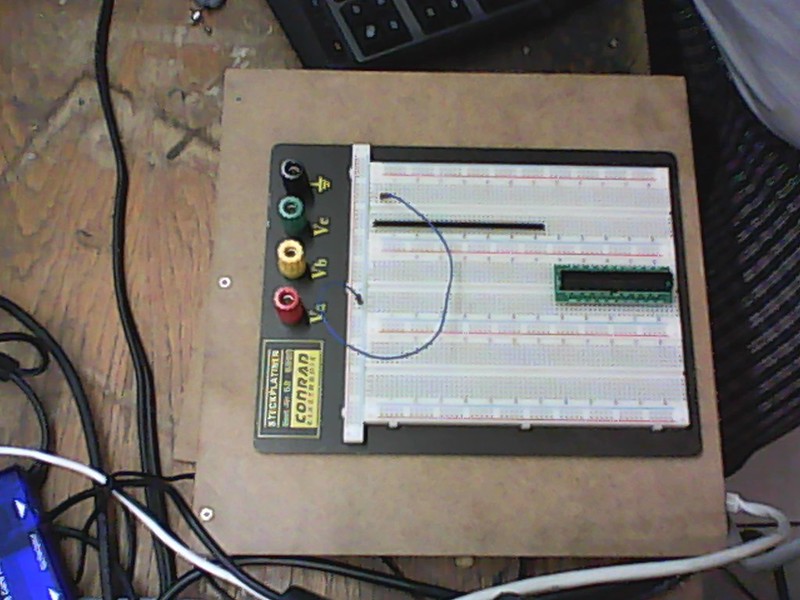
En esta foto pueden ver como he puesto una RaspBerry Pi placa atornillándola con separadores a la tabla. Encima de las 2 placas memoria. A la izquierda el adaptador para que el PC pueda acceder las memorias y por encima la placa "Link" que pondré en la caja negra tal cual Ustedes me lo recomendaron. Inmediatamente por encima está la segunda parte de la LPCXpresso1769 que separé de la placa Link. estoy pensando poner la placa con el ARM Cortex M3 LPC1769 también en una caja.
La protoboard la monté en la tabla como lo pueden ver en esta foto, pues la compré en ebay y venia sin los bujes. Me compré los bujes por separado y pienso poner 1 mas para tener todas las tensiones con que "jugaré" disponibles. Con la protoboard conectaré las diferentes placas que serán usadas en mi sistema de control de escotas para mi modelo de un velero.
Aquí pueden apreciar que los bujes requieren mas espacio que el disponible por las "patitas" de caucho de la protoboard!
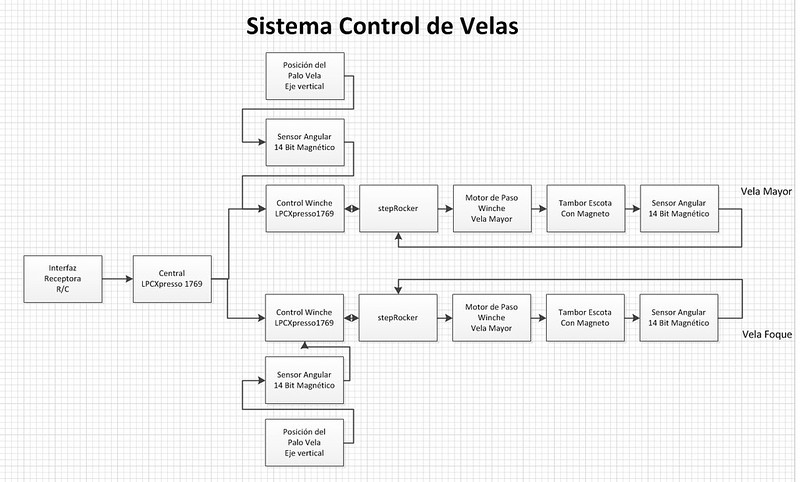
Aquí una foto del diagrama de bloques de lo que será mi sistema de control de escotas dibujado para controlar 2 motores de paso junto con sus respectivos sensores angulares magnéticos.
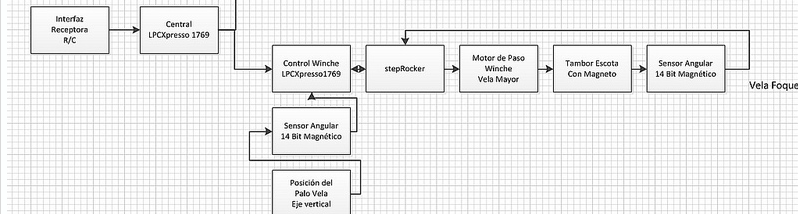
Aquí resaltando uno de los controles del diagrama de arriba. Como es para un velero radio controlado a la izquierda el bloque indica la entrada de los PWM´s que salen de la receptora. La "central" será como el nombre dice el enlace entre el operador y su radio control y los diversos sistemas que iré instalando en mi modelo de un velero. Aquí el sistema se limita al control de las escotas y en esta última foto el control de la escota de una de las 2 velas y por lo tanto presento para que estoy armando el entorno que describo como un "gracias" a la ayuda que me han brindado.
Básicamente el sistema consiste de una placa con el circuito que controla el motor de paso, en el diagrama denominado "stepRocker" en referencia a la placa que usé en mi
Tutorial avanzado sobre motores de paso y una placa con otro controlador que hace que el control del motor de paso haga lo que el operador indica por la posición de sus controles en la emisora.
Para cumplir esta tarea esa placa, aquí la LPCXpresso1769 que presenté al principio de hilo recibe informaciones sobre la posición angular actual del palo de la vela.
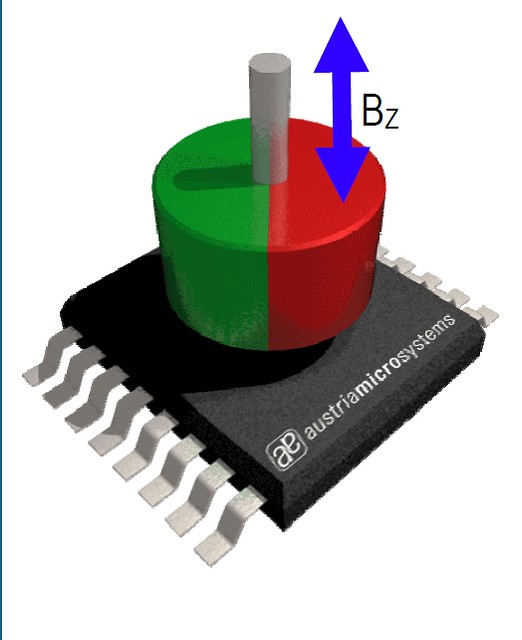
Esta información esa disponible en el sensor magnético angular AS5047D en paralelo como dato de 14 bits de resolución de lo que se denomina posición absoluta y de forma digital incremental por los 3 PWM´s A, B e I que siguen las reglas del codificador de cuadratura. El controlador LPC1769 contiene la función periférica del codificador de cuadratura, así que las 3 señales correspondientes del sensor magnético angular AS5047D se conectan directamente a los pines correspondientes del LPC1769.
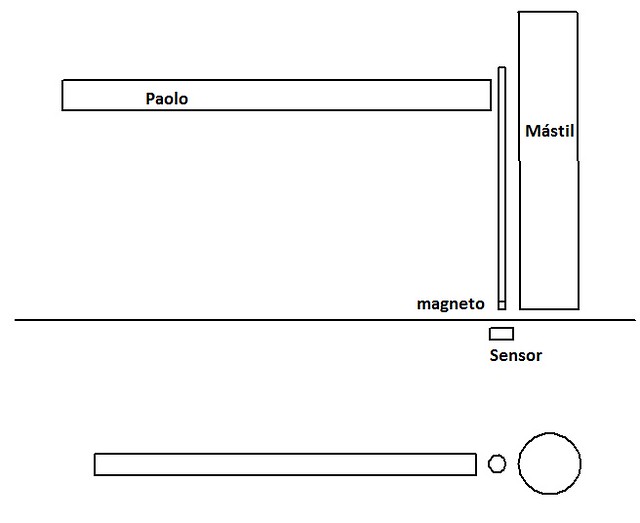
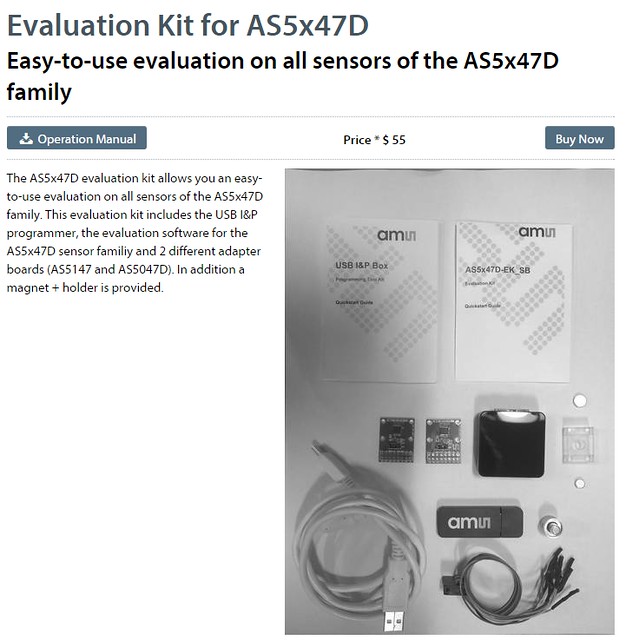
Aquí un gráfico que ilustra como funciona el sensor angular magnético y aquí el kit de evaluación que utilizaré para mis experimentos:
Las plaquitas pequeñas son 2 diferentes sensores angulares, a la derecha abajo es el "porta magnéto que en mi modelo girará a la par del palo de la vela como lo muestra el gráfico.
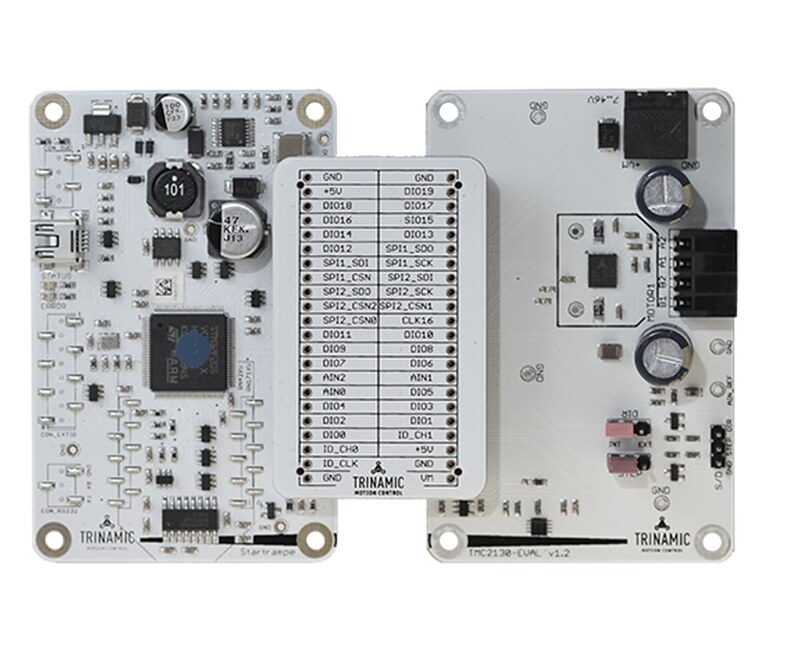
Esto se ve en el diagrama de bloques en la "vertical abajo". Como la tecnología avanza y como en mi modelo estarán 12 baterías LiFePO4 que llenas dan approx. 40 VDC y vacías 24 VDC, la placa del kit de evaluación del TMC2130:
Esta nueva generación de sistemas de evaluación son hasta mas adecuadas tanto para mi durante los experimentos, como luego en el modelo! El kit consiste de 3 placas. La placa "Puente" en el centro da completo acceso a todas las líneas del circuito entre la placa con el controlador a la izquierda y la placa con la componente TMC2130 a la derecha. En mi sistema de control de escotas la placa con el controlador a la izquierda será reemplazado por la LPCXpresso1769. este Kit de Evaluación por lo tanto me permitirá observar la comunicación entre el controlador y la componente TMC2130 para lo cual tengo a mi disposición la funcionalidad de "analizador lógico" que forma parte de las funcionalidades que brinda la herramienta "Analog Discovery"

Así en un primer paso voy a familiarizarme con Linux usando la placa RaspBerry Pi B+ y en ese contexto también con el uso de sus pines GPIO. Por un lado voy a hacer experimentos electrónicos que un libro sobre el RaspBerry Pi presenta y apenas me sienta capacitado trataré de establecer una comunicación entre el RaspBerry Pi y la placa LPCXpresso1769. ese siguiente paso significa que tengo que aprender tal cual lo hago en el RaspBerry Pi lo equivalente en la placa LPCXpresso. Tengo pensado aprender a instalar y usar el sistema operacional FreeRTOS en la placa LPCXpresso1769 y dentro de este entorno ir transfiriendo por partes la funcionalidad de la placa con el controlador del kit de evaluación para el TMC2130. Esa placa tiene un ARM Cortex M4 de Freescale MK20 y el programa que es ejecutado en este esta disponible gratis en el internet como "source".
Vale mencionar aquí que en el sistema de evaluación del TMC2130 viene el programa que implementa el entorno de interpretación de la lengua de control TMCL en su actual versión 3.0 que se puede descargar gratis del sitio de Trinamic.com. He presentado este en una versión anterior en el tutorial avanzado sobre motores de paso del que di el enlace mas arriba.
Como pueden imaginarse y es especial debido a mis problemas de salud que este subproyecto, que a mi me tiene fascinado, me tendrá ocupado un buen tiempo!