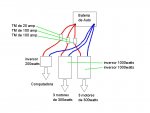
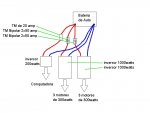
Batería automotriz: 12V/65Ah /acido-plomo ; cuidado que tu robot no vaya a dar un mal paso, a los motores y a la electrónica no le gustan el ácido sulfúrico aunque esté diluido!!!.
Los robots utilizan baterías secas , para la potencia que estas buscando deberías trabajar con mayor voltaje DC , 24V...48V , para bajar el amperaje .
Los motores de carretillas eléctricas se prestan para lo que quieres realizar. No te olvides el cargador, con carga rápida (para la competencia) y carga normal ( cuando descanza el guerrero).
Le diseñe un sistema que detecta la inclinacion inmediata sellando automaticamente las salidas de los gases(hidrogeno explosivo) y acido de la celdas de la bateria, un sistema tipo ventilador Chasis fan(sin riesgo para la cantidad de gases explosivos en la cantidad que se presentan segun el analisis continuo que realiza el software por estimaciones..) extrae los gases durante el funcionamiento normal del robot(todo entubado), en la carga se extrae la bateria, no permito cargadores rapidos ya que pueden dañar las celdas de la bateria plomo-acido, uso uno automatico(de carga "normal" digamos).
Las baterias secas son caras pero livianas...opte por lo barato y pesado jajajajja

No se como seran los motores que mencionas pero los que uso son de los mas potentes y economicos que conozco, efectivos para el peso que tiene que mover el robot, tengo que acatar los voltages a los que funcionan
no me queda otra....Seria bueno poder competir ...pero va a tardar y bastanteLuego de ganar tanta experiencia diseñando este robot(todavia en construccion y rediseño)...e pensado en otros modelos humanoides mas ligeros como computadora a bordo mini itx(tipicas en robots como qbo) y pilas de litio(o packs de las mismas), con efectores como motores de mini compresor en ese caso siendo mas adecuados por lo ligero del engendro, o una interfaz Arduino Mega o Nano para potencias(yo uso actualmente de interfaz para la potencia puerto paralelo basada en integrados latch octales todo hecha por mi a mano
) ...pero por el momento el ogro de fuertes miembros y pesado espiritu esta en desarrollo
Última edición: