Supongo que el problema es entonces que el motor gordo te pide bastante corriente para funcionar. Seguro que al pedirte chicha, el integrado L293 tan solo puede darte 0.6A continuamente, con un pico de 1.2A momentáneamente, a la que te pases de esto se quemará, que es lo que te pasó.
Mira en las hojas de características del motor que tienes, porque allí encontrarás el dato de la corriente nominal y la tensión nominal necesarias para hacer funcionar el motor correctamente.
Si ves que por ejemplo, la corriente nominal del motor es de 2A, ya sabes que no puedes usar el L293 porque tan solo te da 0.6A, así que lo que se me ocurre es que en vez de usar este integrado (que sólo son diodos y buffers), usaras el L298 que puede darte hasta 2A por canal y luego poner tú los diodos sueltos y que aguanten 2A claro.
Pero entonces con el L298 tendrías que cambiar el planteamiento del proyecto porque seguramente el tema de programación sería diferente...
Luego tal vez sea importante que colocaras un condensador grandote, de unos 470uF cerca del pin de alimentación del L293 (o del L298) y otro pequeñito de 100nF en paralelo, para almacenar carga.
¿La secuencia de estados que controla el motor la envías tú desde el micro mediante programación a pico y pala?
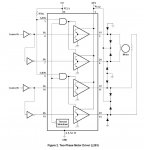
Te recomiendo que descargues los datasheets del L298 (etapa de potencia) y el L297 (etapa de control) que se usan conjuntamente para controlar un motor paso a paso, y que mires un poco el circuito que proponen.
Para comparar con tu caso, fíjate que el circuito que ellos proponen tiene unos diodos, pues estos diodos son el equivalente a tu L293, pero claro, con la ventaja que el L298 puede sacar hasta 2A a diferencia del L293 que solo da 0.6A.
Estoy casi seguro que el problema es de intensidad que pide el motor y que el circuito no es capaz de dar.



") ?
?