Acerca de multiplexar 48 motores.
Requiriendo 2 bits de información para controlar cada motor.
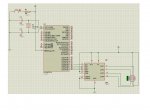
Los 96 bits se logran empleando 12 registros de desplazamiento de 8 bits c/u conectados en cascada.
El tiempo para actualizar 96 bits, con 10 khz de frecuencia de reloj serían 9,6 ms (96 x 100 us).
Si se suma el pulso de sincronismo para los latch, se llega a 9,7 ms.
Esto permite lograr una respuesta en frecuencia de un paso cada 10 ms, para cada motor.
Cables de transmisión: 1) dato, 2) clock, 3) latch y 4) retorno (GND).
Performance lograda: 48 motores, 100 pasos por segundo c/u, cableado largo: 4 hilos.
Estructura simple, modular y escalable. Componentes accesibles.
Materiales: 12 circuitos de registro de desplazamiento de 8 bits, placas de circuito impreso.
Aparte: los 48 motores y sus 48 placas de potencia, claro está.
Requiriendo 2 bits de información para controlar cada motor.
Los 96 bits se logran empleando 12 registros de desplazamiento de 8 bits c/u conectados en cascada.
El tiempo para actualizar 96 bits, con 10 khz de frecuencia de reloj serían 9,6 ms (96 x 100 us).
Si se suma el pulso de sincronismo para los latch, se llega a 9,7 ms.
Esto permite lograr una respuesta en frecuencia de un paso cada 10 ms, para cada motor.
Cables de transmisión: 1) dato, 2) clock, 3) latch y 4) retorno (GND).
Performance lograda: 48 motores, 100 pasos por segundo c/u, cableado largo: 4 hilos.
Estructura simple, modular y escalable. Componentes accesibles.
Materiales: 12 circuitos de registro de desplazamiento de 8 bits, placas de circuito impreso.
Aparte: los 48 motores y sus 48 placas de potencia, claro está.
") .... éxito.
.... éxito.