Follow along with the video below to see how to install our site as a web app on your home screen.

Nota: This feature currently requires accessing the site using the built-in Safari browser.
 (en el caso de la imagen blanco)
(en el caso de la imagen blanco)Aunque la compuerta NAND parece ser la combinación de 2 compuertas (1 AND y 1 NOT), ésta es más común que la compuerta AND a la hora de hacer diseños. En la realidad este tipo de compuertas no se construyen como si combináramos los dos tipos de compuertas antes mencionadas, si no que tienen un diseño independiente
En el siguiente diagrama se muestra la implementación de una compuerta NOT con una compuerta NAND. En la tabla de verdad se ve que sólo se dan dos casos a la entrada: cuando I = A = B = 0 ó cuando I = A = B = 1
I | X
0 | 1
1 | 0
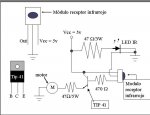
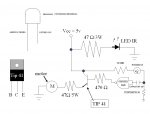
anthony123 dijo:Pues lei por ahi en la web que si los CMOS se dejan con pines sin conexción, se destruyen! Pero sería bueno decir que se emplearia otra NAND: para el otro lado del robot, quedando solo 6 pines sueltos. Ademas amigo Maztema si puedes prueba con los pulsos y el 555. Tambien podrías probar con lo que dijo fogonazo alguna vez: ponerle la maxima intensidad al IR Tx. (ejemplo: si la maxima intensidad es 15 mA, ponerle 16 mA por X segundos , tiempo que lo dará el 555, previamente configurado)
Muchachos yo tambien lo estoy hacieno y los motores funcionan pero no se detiene y el receptor se caleinta demasiado si alguien me puede ayudar se lo agradeceriasoschorni dijo:hola amigos del foro, miren estoy haciendo este proyecto para la escuela, pero lo armamos y no funciona.
lo arme 3 veces y no va ni pa tras ni pa delante, no se uqe hacer
necesito ayuda