Buenas amigos
Antes de empezar comentarles que en mi país se acercan 2 competiciones de Robotica y como fiel participante de robot Zumo de 3kg, pensé construir un nuevo Robot para participar en ambas competiciones.
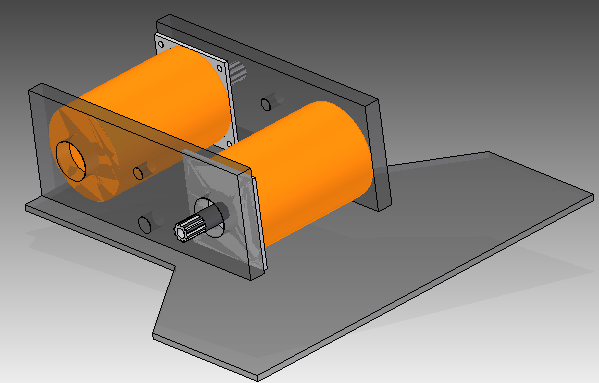
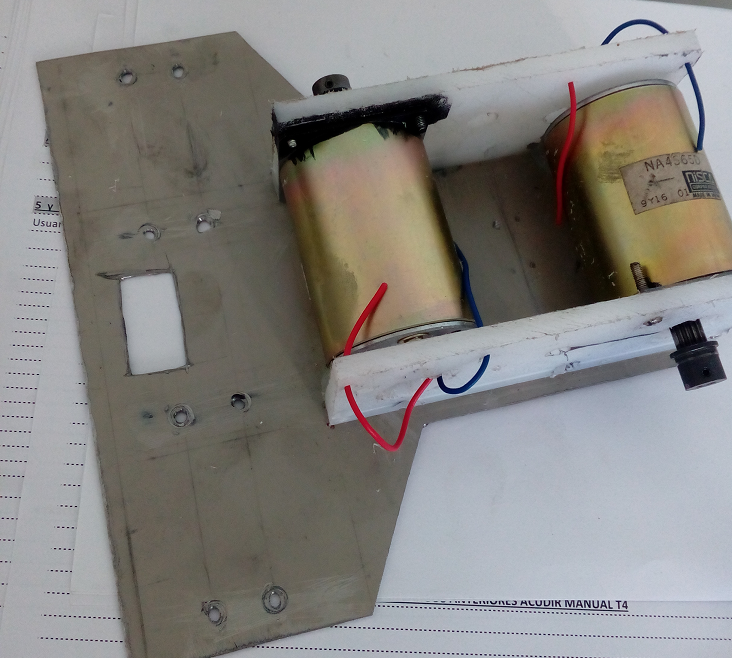
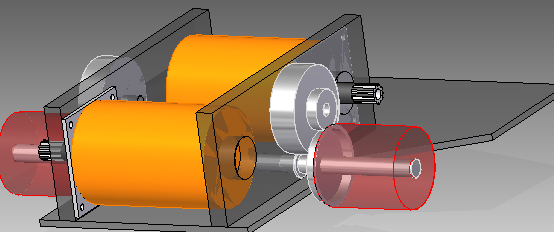
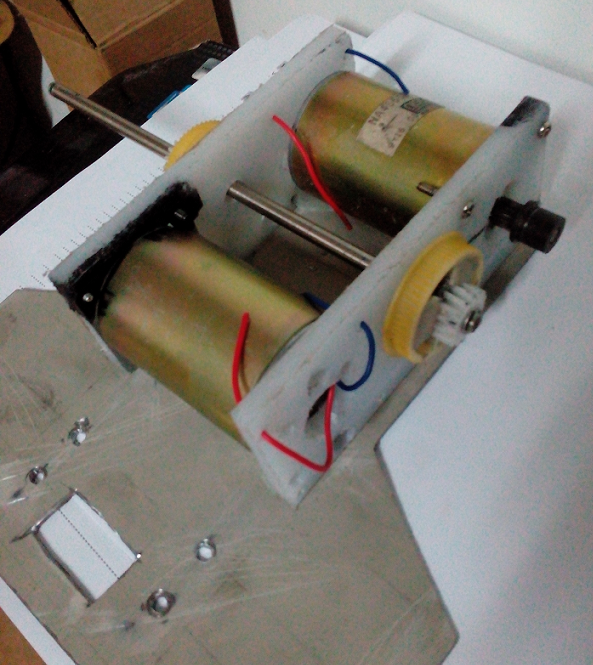
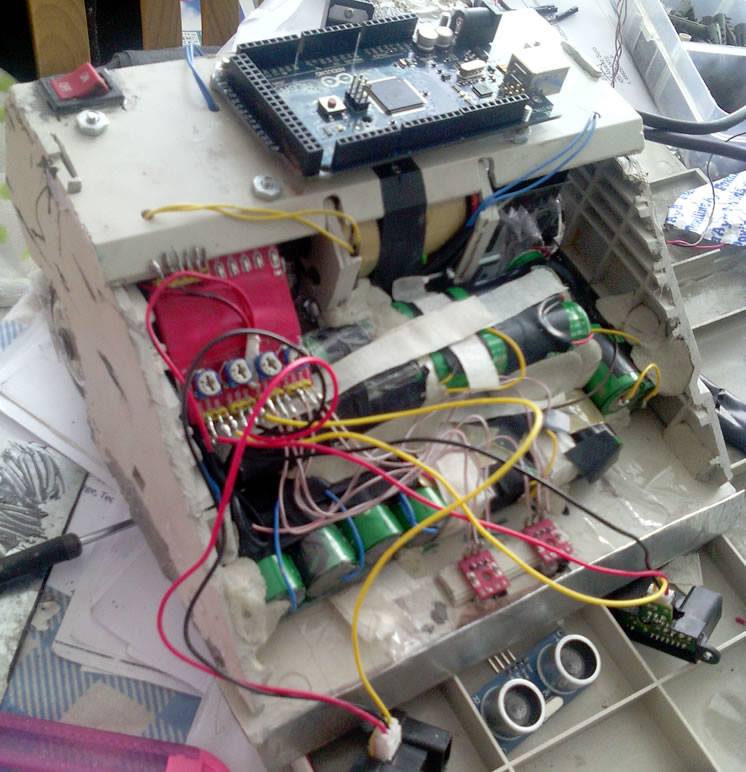
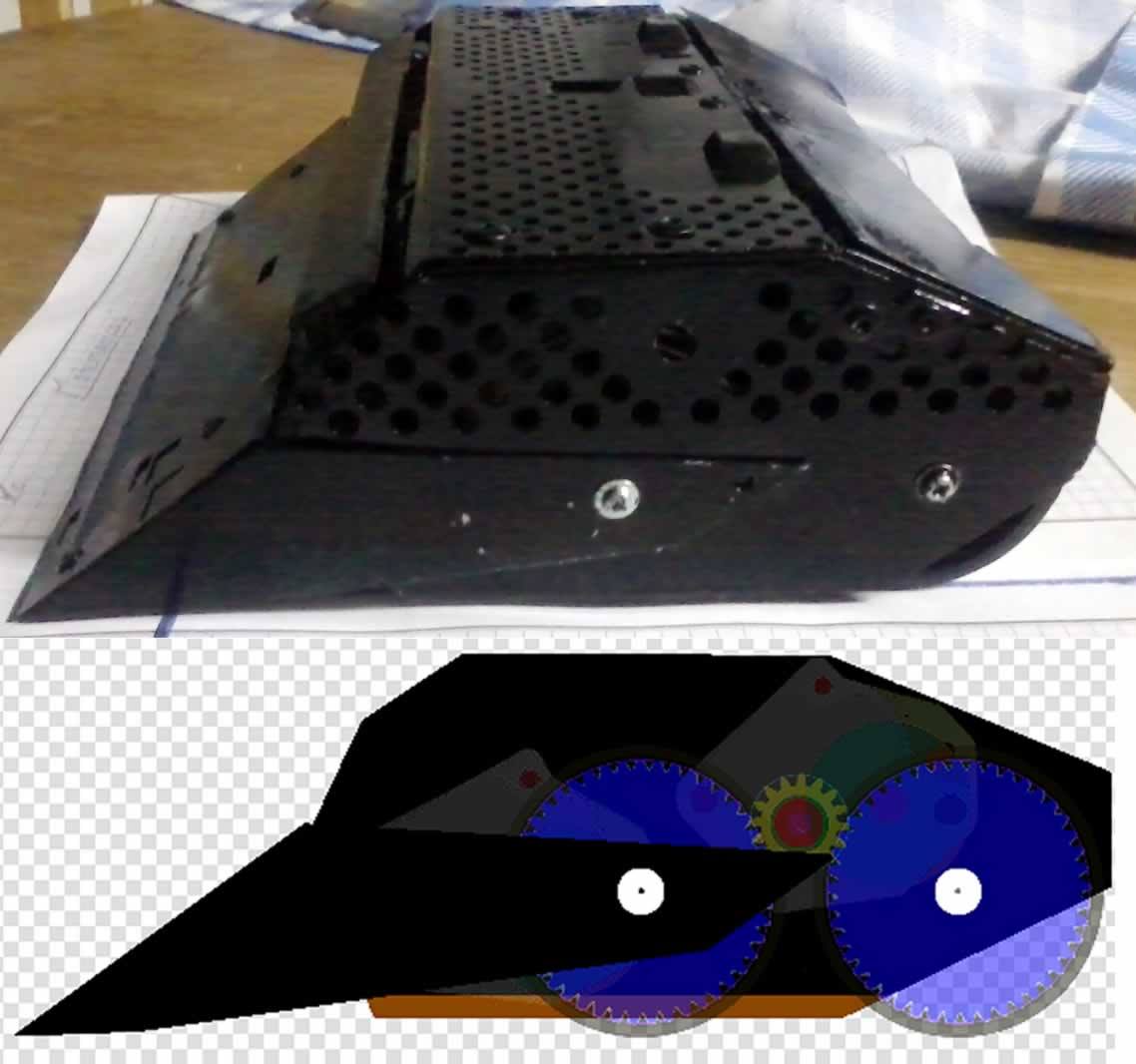
bueno algunas fotos de mis anteriores diseños, como ven aun son muy feitos pero se esta mejorando aun.


Empezemos que en 3 semanas debo de terminar el robot y concluir este post, ademas de responder consultas si gustan.")
Antes de empezar comentarles que en mi país se acercan 2 competiciones de Robotica y como fiel participante de robot Zumo de 3kg, pensé construir un nuevo Robot para participar en ambas competiciones.
bueno algunas fotos de mis anteriores diseños, como ven aun son muy feitos pero se esta mejorando aun.
Empezemos que en 3 semanas debo de terminar el robot y concluir este post, ademas de responder consultas si gustan.