hola me llamo kevin, estoy construyendo un robot seguidor de linea blanca, esoty usando el pic 16f627 y sensores QRD 1114 se conecta igual que el cny70, solo que este es mucho mejor para dientificar la linea negra, aparte de que son mas potentes, use una resistencia de 330ohms y un potenciometro de 20k ohms para adeuar el voltaje del QRD a las carateristicas de ttl, lo unico que e falta es el programa para el eguidor, mi seguidor es de carreras, asi que aprovecho para ver si alguien me podria ayudar con esto del programa, estoy usando el MPLAB
pero regreso a que el CNY lo pueden cambiar por el QRD genralmente lo piden asi y tiene un costo de unos 20 pesos, haber si esto ayuda.
otro consejo que les puedo dar es que en vez de utilizar motores de 12 volts utilicen motores de juguete, bueno asi los encontre yo en las tiendas electrnicas, son redondos y un poco mas grandes que los de 12 volts pero tienen velocidad y potencia con una pila de celular motorola de 3.7 volts, consumiendo un amperade de .3 A jalando un peso de unos 300 gramos, son muy buenos, tambine los pueden encontrar en los carros de control remoto que tengas adaptados motoreductores,
otra cosa es que para el puente h pueden utilizar el circuito L293B ¡, hay unas hojas de especificaciones que indican como conectar las salidas del pic al puente h junto con los diodos 1n4004, si no le ponen los diodos el circuito se calienta o deja de funionar despues de unos instatnes de que este funcinando, si queires puedo mandarles el circuito que tengo utilizo un irf 511 solo para controlar que el amperaje que consume este motor no queme el pic, por que estos motores tiene la potencia suficiente para recorrer unos 5 metros en unos 2.5 segundos. solo con la bateria de motorola de celular
no utilicen relevadores por que son muy lentos en su lugar puede utilizar transistores C557B conectandole una resistencia de unos 470ohms para que no se caliente
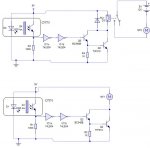
tratare de subir un arhivo con las conecciones de los QRD y como conecte el irf 511 para qe no se quemara el pic y poderle meter un voltaje de unos 20 volts al puente h , el cual soporta hasta 35 volts, con los diodos