Hola a todos...
necesito ayuda con este proyecto, ya que apenas estoy comenzando a conocer los sistemas automaticos de control...
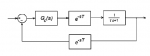
necesito implementar utilizando amplificadores operacionales, las señales y bloques que conforman un sistema de control con las siguientes caracteristicas:
Constante de retardo T=1.28 segundos.
Constante de tiempo τ=0.25 segundos.
Gc(s) permite obtener en el sistema un margen de fase aproximadamente igual a 30°,
un error de estado estacionario inferior al 5% y un sobrepaso inferior al 20%.
adjunto la imagen con la bucla tipica.
me gustaria que me ayuden con sugerencias para poder comenzar e implementar el circuito..de antemano muchas gracias por la ayuda!!
necesito ayuda con este proyecto, ya que apenas estoy comenzando a conocer los sistemas automaticos de control...
necesito implementar utilizando amplificadores operacionales, las señales y bloques que conforman un sistema de control con las siguientes caracteristicas:
Constante de retardo T=1.28 segundos.
Constante de tiempo τ=0.25 segundos.
Gc(s) permite obtener en el sistema un margen de fase aproximadamente igual a 30°,
un error de estado estacionario inferior al 5% y un sobrepaso inferior al 20%.
adjunto la imagen con la bucla tipica.
me gustaria que me ayuden con sugerencias para poder comenzar e implementar el circuito..de antemano muchas gracias por la ayuda!!