Follow along with the video below to see how to install our site as a web app on your home screen.

Nota: This feature currently requires accessing the site using the built-in Safari browser.

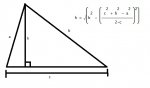
En la imagen adjunta pongo algunos pasos de como calcule la altura.
Si señor y de esa forma serían suficiente dos sensores.... Me parece que teniendo un tiempo de referencia exacto de la transmision se saben las distancias correctas y con eso queda resuelto el problema.
)El lugar geométrico de los puntos cuya diferencia de distancias a otros dos es constante son hipérbolas.Si no se tiene el tiempo de la transmision... me parece que volvemos a tener una ecuacion con dos incognitas al cuadrado que no se puede resolver.

Podes apretar el clip, al lado de la carita feliz. Previsualizar y copiar el enlace de la miniatura, para pegarlo como url en la montaña con el solcito¿como muestro las imágenes adjuntas dentro del texto???
... aprovechemos para tirar un problemita matemático
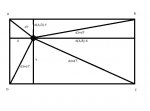
Ver el archivo adjunto 91397
- El origen está puesto arbitrariamente en el centro del rectágulo.
- Los sensores están colocados a mitad de cada lado del rectángulo.
- La frecuencia del reloj es 343kHz ==> cada pulso corresponde a una distancia de 1mm.
- Los únicos datos son L1=1800mm. L2=1000mm , Nac,Nbc y Ndc (la diferencia de conteo entre cada sensor y 'c' , que fué el que recibió el 1er pulso.
* Obviamente, todas las demás longitudes que están en el dibujo se desconocen, las dejé a modo de control.
* También, si bien Nac,Nbc y Ndc son en realidad enteros, los dejé con decimales para que en los cálculos afecte menos el truncamiento.
Conociendo también el número de pulsos Nc, llego a que:
x = 0.5* (Ndc*Ndc - Nbc*Nbc) / L1
y = 0.5* (Nac*Nac - Nc*Nc) / L2
que evaluados en los datos me da el resultado correcto.
)Si estás usando la misma notación:
x = 0.5* (Ndc*Ndc - Nbc*Nbc) / L1 = 109.627... distinto de 221.236
Nones! Leé de vuelta.Nones! Controlá tu cuenta porque me da bien.
Ver figura del cálculo hecho con Matlab.
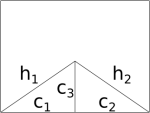
Como el término 2ab, para el trinomio cuadrado perfecto, no lo tengo: me lo invento manteniendo la igualdad[LATEX](h_1)^2-(c_1)^2=(h_2)^2-(c_2)^2
(h_1)^2-(h_2)^2=(c_1)^2-(c_2)^2[/LATEX]
[LATEX]h_1-h_2=Dato
c_1+c_2=Dato[/LATEX]
Ver el archivo adjunto 91300
Sigue sin ser perfecto Los cuadrados no pueden ser negativos. La idea era que me quede:) por lo que me puse a buscar sus raíces hasta que leí esto: http://www.josechu.com/ecuaciones_polinomicas/cuartica_solucion_es.htm, trate de resolverlo como alturas de triángulos y también como intersección de circunferencias pero siempre llego a una ecuación de cuarto grado.
Hay varias formas. Pero ojo al piojo, ninguna es una bonita fórmula de una sola línea....
Eduardo, como se supone que se hace ese problema????
), pero tiene el inconveniente que si el emisor está cerca del centro queda un sistema casi singular y hay tomar precauciones para evitar los errores numéricos.