Amigo venezolano, a ver si te podemos ayudar. El motor me parece ser adecuado. Lo mejor hacer es entender los motores pap bipolares. En comparación parezco tener cierto buen conocimiento de motores pap. Por compartir lo que he aprendido puse el tutorial avanzado sobre pap [URL="Amigo venezolano, a ver si te podemos ayudar. El motor me parece ser adecuado. Lo mejor hacer es entender los motores pap bipolares. En comparación parezco tener cierto buen conocimiento de motores pap. Por compartir lo que he aprendido puse el tutorial avanzado sobre pap aquí en el foro. Sigue el enlace:
https://www.forosdeelectronica.com/f12/tutorial-avanzado-sobre-motores-paso-102981/
A ver si te puedo dar una noción con pocas palabras:
Ver el archivo adjunto 97106
El gráfico muestra un motor pap bipolar sencillo de 4 cables. La calidad del motor es determinada en gran parte por cuanta corriente puede circular por el cable del bobinado.
2,85 A es un valor bueno.
La tensión nominal es de 3.4 V
Que nos dice eso? El cableado de las bobinas aguanta 2.85 A. La tensión nominal nos dice que si aplicamos una tensión de 3,4 V, entonces 2.85 A de corriente fluirán por el cableado de la bobina! Estoy describiendo el estado cuando el motor no gira.
La potencia P que nos da el torque máximo del motor pap no girando es de:
P = Amperios * voltios = 2.85 A * 3.4 V = 9,7 W
Para poder darle al motor mas potencia y en consecuencia mas torque que tenemos para variar? El amperaje de 2.85 A representa el valor máximo de corriente que el motor aguanta!
Nos que el voltaje! Si le aplicamos mas voltaje, entonces normalmente fluiría mas corriente por el cable matando el motor. El truco está en controlar la alimentación del motor usando un PWM! El PWM es un interruptor rápido. Digamos que tenga una frecuencia de 1k Hz.
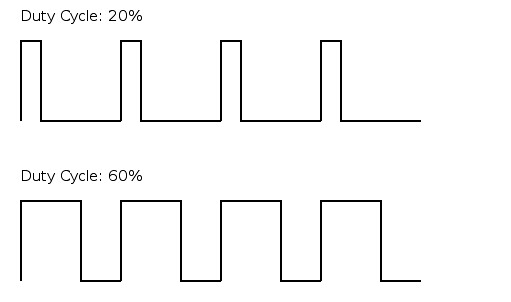
Entonces lo que hace el PWM es que cada 1 ms, deja pasar la corriente durante una parte del tiempo e interrumpe el flujo de corriente. Eso es lo que en inglés se define como "duty cycle"! En el gráfico vemos como ejemplo en la curva superior, que el PWM solo deja fluir la corriente durante un 20% del tiempo, 20% de i ms en nuestro ejemplo!
La curva inferior indica que el PWM dejaría pasar la corriente durante el 60% del tiempo.
Como esto ocurre en el caso de nuestro ejemplo cada 1 ms el motor pap 20% o 60% del tiempo, que la bobina solo recibe menos corriente de lo que resultaria por la tensión aplicada!
Digamos que para tu motor pap le aplicas en vez de 3.4 V 6.8 V! El "duty cicle por lo tanto debe ser del 50%! Durante un 50% del tiempo fluyen 5.7 A a la bobina y en los otros 50% del tiempo 0 A! La bobina, a razón que la PWM trabaja con una frecuencia alta, aquí en el ejemplo 1k Hz, solo registra el promedio y eso son los famosos 2.85 A.
50% del tiempo 5.7 A
50% del tiempo 0 A
(5.7 A + 0 A)/ 2 = 2.85 A
Tomemos como ejemplo que aplicas no 3.4 V, sino 34 V. 10 veces la tensión! Entonces:
10% del tiempo 28.5 A
90% del tiempo 0 A
(28,5 A * 0.1) +
( 0 A * 0.9)
(28.5 A + 0 A) / 10 = 2.85 A
El motor pap solo percibe el promedio, sus famosos 2.85 A!
Miremos ahora que ocurre con el torque, la potencia:
P = A * V = 34 V * 2.85 A = 96.9 W
Comparemos la potencia de tu motor pap activado con 3.4 V y con 34 V:
P = Amperios * voltios = 2.85 A * 3.4 V = 9,7 W (tu motor pap con 3.4 V)
P = Amperios * voltios = 2.85 A * 34 V = 96,9 W
Tu motor pap rinde 10 veces mas la potencia, 10 veces el torque!
Tu motor pap tiene que tener un circuito de control que genere la "duty cycle" del PWM dependiendo de cuanta tensión apliques al motor pap! Cualquier controlador, me refiero a los chips, es capaz de generar un PWM y eso de forma automática según los valores que se pongan en los registros de control del PWM.