problema con altura sensor CNY70 :
ei !
soy un estudiante de batchillerato que estoy construyendo un robot rastreador, que sigue una linea blanca.
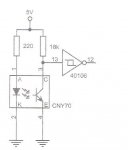
tengo un problema con los sensores cny70 ya que cuando los situo en una altura me funcionan bien, pero cuando vuelvo a encender el robot, luego les tengo que modificar un poquito la altura porque sino en la altura anterior no me lo encuentran !
es un poquito raro el tema, pero, Si alguien a construido un robot con esos sensores, que me diga mas o menos a la altura que los ha situado, y asi los fijare yo, porque la verdad no se que pasa
PD: los sensores estan en perfecto estado.
Oriol
ei !
soy un estudiante de batchillerato que estoy construyendo un robot rastreador, que sigue una linea blanca.
tengo un problema con los sensores cny70 ya que cuando los situo en una altura me funcionan bien, pero cuando vuelvo a encender el robot, luego les tengo que modificar un poquito la altura porque sino en la altura anterior no me lo encuentran !
es un poquito raro el tema, pero, Si alguien a construido un robot con esos sensores, que me diga mas o menos a la altura que los ha situado, y asi los fijare yo, porque la verdad no se que pasa
PD: los sensores estan en perfecto estado.
Oriol