
Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.

Nota: This feature currently requires accessing the site using the built-in Safari browser.
Estás usando un navegador obsoleto. No se pueden mostrar este u otros sitios web correctamente.
Se debe actualizar o usar un navegador alternativo.
Se debe actualizar o usar un navegador alternativo.
Robotica, pequeño tutorial+construccion y desarrollo de minirobot
- Autor Dario
- Fecha de inicio
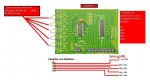
bueno, para despejar algunas dudas, subo este diagrama del conexionado del bot. con esto creo que ya se entiende para que esta el 40106 y los jumpers. ah, CMCON = 7 ' desactivo el convertidor AD del puerto A, es porque el puerto A de este pic, tiene comparadores que deben desactivarse para usarlos como entradas digitales.
saludosss, pronto subire mas practicas, no desesperen

saludosss, pronto subire mas practicas, no desesperen
Última edición:
exelente el trabajo d@rio , la verdad tambien lo estoy armando .
si no es mucho pedir podrias por favor poner un ejemplo de como hacerlo un sigue lineas.
otra vez gracias
otra vez gracias
amigo me podría mandar la configuración del cable que se conecta al pc del computador del jdm, ah y como esta eso por allá
saludos
Ok, segun tengo entendido, en uno de los rar que subi, esta el detalle, pero por si acaso no esta, aqui lo subo de nuevo... lamento mucho no poder subir mas info, estoy muy atareado en mi taller... apenas tenga tiempo subo un sigue lineas que ya estoy practicando
saludosss.
Adjuntos
Última edición:
hola dario, este es pag en donde encontre la onfiguracion del icprog http://www.mecatronica.es/index.php...69bc5857f86d=4d5c9e8cdba00600d3d9835522486466
lo intente de todas maneras pero el icrog tiene muchos problemas
saludos
lo intente de todas maneras pero el icrog tiene muchos problemas
saludos
Última edición:
bueno, despues de tanto tiempo, aca les dejo otro ejemplito de bumpers infrarrojos. con este, pude lograr que mi robot entre y salga de un pequeño laberinto improvisado con un par de cosas como radios, cajas y lectoras de dvd rom. tambien dejo unos videos de su funcionamiento. en este caso, les dejo solo el codigo pbp para oligarlos a aprender a compilar jeje para los que pidieron un siguelineas, aca tambien dejo un ejemplo en pbp para que experimenten. yo todavia no lo probe, asi que si funciona, me avisan. ah, les cuento que el oscilador con 555 tiene su pin 4 colocado al positivo, por eso, el programa tiene una pequeña diferencia con los otros.
amigo diodito: ¿que pudiste lograr? saludosss
bumper.
sigue linea blanca sobre fondo negro
vista aerea.
camara on board.
para los que pidieron un siguelineas, aca tambien dejo un ejemplo en pbp para que experimenten. yo todavia no lo probe, asi que si funciona, me avisan. ah, les cuento que el oscilador con 555 tiene su pin 4 colocado al positivo, por eso, el programa tiene una pequeña diferencia con los otros. amigo diodito: ¿que pudiste lograr? saludosss
bumper.
Código:
'configuracion de fuses
@ DEVICE MCLR_OFF, INTRC_OSC, WDT_OFF, LVP_OFF, BOD_OFF, PWRT_ON, PROTECT_OFF
CMCON = 7 ' desactivo el convertidor AD del puerto A
TrisA=%11111111 'todo el port A como entrada
TrisB=%00000000 'todo el port B como salida
PORTA = %11111111 'todo el port A en 1
PORTB = %00000000 'todo el port B en 0
ojoder var bit 'variable para guardar el valor de porta.0
ojoizq var bit
portb = %00000000 'variable para guardar el valor de porta.1
pause 5000 'espero 5 segundos para empezar
inicio:
portb = %00001001 'oscilador encendido motores apagados
ojoder = porta.0 'ojoder toma el valor de porta.0
ojoizq = porta.1 'ojoizq toma el valor de porta.1
IF ojoizq = 1 and ojoder = 0 THEN izq 'si la variable ojoizq es = a 1 gira a la izquierda
if ojoder = 1 and ojoizq = 0then der 'si la variable ojoder es = a 1 gira a la derecha
goto inicio
der:
PORTB = %00001010 'giro a la derecha
pause 50 'espero 50 milisegundos
ojoizq = porta.1 'ojoizq toma el valor de porta.1
IF ojoizq = 1 THEN der 'si ojoizq es igual a 1 salta a der
ojoder = porta.0 'ojoder toma el valor de porta.0
IF ojoder = 0 THEN inicio 'si la variable ojoder es = a 0 vuelve a inicio
goto der ' ir a der
izq:
PORTB = %00000101 'giro a la izquierda
pause 50 'espero 50 milisegundos
ojoder = porta.0 'ojoder toma el valor de porta.0
IF ojoder = 1 THEN izq 'si ojoder es igual a 1 salta a izq
ojoizq = porta.1 'ojoizq toma el valor de porta.1
IF ojoizq = 0 THEN inicio 'si la variable ojizq es = a 0 vuelve a inicio
goto izq 'ir a izqsigue linea blanca sobre fondo negro
Código:
'configuracion de fuses
@ DEVICE MCLR_OFF, INTRC_OSC, WDT_OFF, LVP_OFF, BOD_OFF, PWRT_ON, PROTECT_OFF
CMCON = 7 ' desactivo el convertidor AD del puerto A
TrisA=%11111111 'todo el port A como entrada
TrisB=%00000000 'todo el port B como salida
PORTA = %11111100 'todo el port A en 1
PORTB = %00000000 'todo el port B en 0
ojoizq var bit
ojoder var bit
inicio:
portb = %00001001 'motores On
ojoder = porta.0 'ojoder toma el valor de porta.0
ojoizq = porta.1 'ojoizq toma el valor de porta.1
IF ojoizq = 1 THEN der 'si la variable ojoizq es = a 1 gira a la izquierda
if ojoder = 1 then izq 'si la variable ojoder es = a 1 gira a la derecha
goto inicio
der:
PORTB = %00011010 'giro a la derecha y mantengo el 555 encendido
pause 10
ojoder = porta.0 'ojoder toma el valor de porta.0
IF ojoder = 0 THEN inicio 'si la variable ojoder es = a 0 vuelve a inicio
goto der ' ir a der
izq:
PORTB = %00010101 'giro a la izquierda y mantengo el 555 encendido
pause 10
ojoizq = porta.1 'ojoizq toma el valor de porta.1
IF ojoizq = 0 THEN inicio 'si la variable ojoder es = a 0 vuelve a inicio
goto izq 'ir a izqvista aerea.
camara on board.
Última edición:
jeje... no, es la misma camara que utilice para hacer el primer video de arriba montada en el robot.ah por cierto lo de la cámara es ip
me alegra que hayas aprendido y te haya sido de utilidad.
saludosss
Has pensado qué tan factible podría ser que la cámara sea inalámbrica ?
(Por supuesto, yo complicándote la vida
jeje... eso hace desde que era un chiquitin que lo vengo pensando. de hecho, tengo una webcam y 2 microcamaras de vigilancia pero lamentablemente, no he podido conseguir un buen transmisor para estas ultimas. todos los que hay en la web, tienen algun detalle para considerar... es por eso que pensaba comprar un kit de vigilancia inalambrico jeje... pero por ahora no puedo.
sera para mas adelante... por cierto... que tan factible podria ser conectar una webcam a un pic con entrada usb???
saludosss
Me refiero a los problemas que se presentan para implementar todo desde "cero":
1.- la frecuencia de muestreo necesaria para capturar video (>10 cuadros /seg.),
2.- el recorrido de los pixeles,
3.- el envío por RF, el alcance, la detección, etc.
Si compramos todo hecho no vale !
Para eso pensemos en adaptar un celular directamente.
1.- la frecuencia de muestreo necesaria para capturar video (>10 cuadros /seg.),
2.- el recorrido de los pixeles,
3.- el envío por RF, el alcance, la detección, etc.
Si compramos todo hecho no vale !
Para eso pensemos en adaptar un celular directamente.
Última edición:
Temas similares
- Respuestas
- 1
- Visitas
- 597
- Respuestas
- 0
- Visitas
- 619
- Respuestas
- 4
- Visitas
- 1K
- Respuestas
- 15
- Visitas
- 4K