


hola, en verdad no sabia donde poner este tema, no se si esta ok aca.
estaba mirando esta placa , de arduino, llamada Driver Pololu A4988
y me pase a la hoja de datos de el chip:
https://www.pololu.com/file/0J450/a4988_DMOS_microstepping_driver_with_translator.pdf
no es para ningun uso en especial, solo que me gusta entetenerme leyendo acerca de distintos chips.
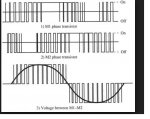
y mirando en la hoja de datos veo :en pagina 8 , 15 y 16 imagenes de ondas senoidales escalonadas.
yo de ingles no se mucho .
pense que ese ci con esa configuracion de transistores a la salida mandaba pulsos .
pero en las imagenes veo que "crea" ondas senoidales.
es asi ?
o estoy errado?
estaba mirando esta placa , de arduino, llamada Driver Pololu A4988
y me pase a la hoja de datos de el chip:
https://www.pololu.com/file/0J450/a4988_DMOS_microstepping_driver_with_translator.pdf
no es para ningun uso en especial, solo que me gusta entetenerme leyendo acerca de distintos chips.
y mirando en la hoja de datos veo :en pagina 8 , 15 y 16 imagenes de ondas senoidales escalonadas.
yo de ingles no se mucho .
pense que ese ci con esa configuracion de transistores a la salida mandaba pulsos .
pero en las imagenes veo que "crea" ondas senoidales.
es asi ?
o estoy errado?

")

